摘要
针对现有煤矿语音通信系统的不足,设计了一种既可以够满足正常语音通信要求,又可以在紧急情况下保障应急语音通信的煤矿语音通信系统。该系统采用集成无线收发器和8051微处理器的CC2530作为主控芯片,采用AMBE2000语音编解码芯片,正常情况下采用CAN总线通信模式,应急情况下采用无线通信模式。详细介绍了系统的硬件设计和软件设计,并通过定性和定量两种方法进行了实验,通过实验证明该系统的声音强度、语音音质、失真度等指标均能满足现场的需求。
引言
煤矿安全一直是煤矿生产中的重中之重,保障井下语音通信特别是应急情况下的语音通信是保障煤矿安全生产的前提。现有的井下语音系统一般包括有线和无线两种方式。其中,有线方式主要包括调度电话和井下扩音电话系统两种;无线方式主要为井下小灵通系统(基站之间也是基于有线的)。这些传统的语音通信系统在正常情况下可以满足煤矿语音通信的需要,但如果发生紧急情况,有线连接被切断,现有的语音通信系统将面临瘫痪的可能。而新兴无线传感器系统在语音通信中又面临着功耗控制等难题。因此建立一种具有自愈性、自组织,能在紧急情况下恢复和保障井下应急语音通信的系统成为当务之急。
针对以上问题,本文结合CAN总线和无线传感器网络的优点,提出了两级网络的井下语音通信系统,采用CAN总线和无线传感器网络共同组网。在正常情况下采用CAN总线通信方式,一旦发生紧急情况,无线传感器网络自动启动,同时利用无线传感器网络的自愈性能,采用人工布点的方式可以快速恢复遭到破坏的语音通信系统,尽快与被困矿工取得联系,保障应急救援工作的顺利进行。
1 系统网络结构
本文设计的两级网络语音通信系统结合了CAN总线和无线传感器网络的优点,采用了CAN总线网络和WSN无线传感器网络共同组网的方式。在正常情况下,采用CAN总线来传输语音信号;在紧急情况下,如电源或电缆被切断时,无线传感器网络自动启动,采用无线传感器网络传输语音信号。另外,还可以通过人工部署新的传感器节点来扩展或恢复被破坏的无线传感器网络,保障井下语音通信的正常。正常情况和紧急情况下的系统结构分别如图1和图2所示。
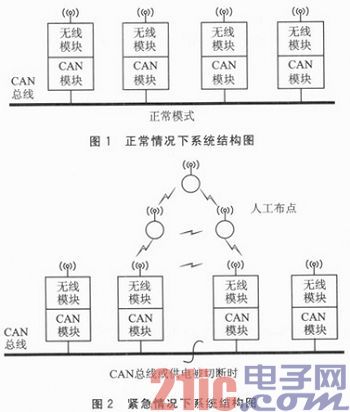
系统节点分为正常的语音节点和紧急情况下使用的传感器节点两种。语音节点具有CAN总线和WSN两种通信模式,是正常组网时的主要节点;传感器节点仅具有无线通信方式,是在紧急情况下恢复和扩展语音通信网络时所采用的。传感器节点和语音节点在采用无线通信时采用多跳中继传输,配合CAN总线的有线通信,实现正常和紧急情况下的语音通信。
2 节点硬件设计
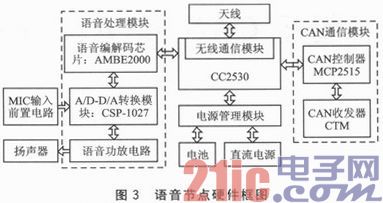
语音节点由CC2530、语音处理模块CAN通信模块、电源管理模块等组成;传感器节点由CC2530、语音处理模块、电源管理模块等组成。其中语音节点的结构如图3所示。
2.1 CC2530及无线通信模块
无线网络节点的核心是微处理器芯片,本设计采用了TI公司推出的CC2530片上系统芯片。CC2530是用于IEEE 802.1 5.4、ZigBee和RF4CE应用的片上系统(SoC)解决方案,它将一个高性能的RF无线收发器和一个增强型的8051微处理器集成到一块芯片上,该芯片具有优异的无线性能、低功耗、低成本,而且其内部集成8路12位ADC、2个支持多种串行通信协议的USART模块、21个通用I/O接口等,仗其有良好的扩展性。CC2530的主要外围电路如图4所示。

2.2 语音处理模块
语音处理模块包括语音采集模块、A/D和D/A转换模块、语音编解码模块、语音功放等组成。语音信号通过MIC电路采集后,送到A/D、D/A转换模块进行A/D转换和压缩处理,处理过的信号通过语音编解码模块进行编码,变成数字信号发送出去。
2.2.1 A/D、D/A转换
MIC采集的语音信号为模拟信号,要进行数字语音传输首先要将模拟信号转变为数字信号。本系统采用的A/D、D/A转换芯片是Lucent公司的CSP1027。CSP1027是一款高精度线性语音频带编解码器,具有16位的A/D、D/A转换能力。它的模拟接口处内置了音频前置放大器,
因此在电路设计中,可以直接将小信号的语音信号直接输入CSP1027的模拟端。语音处理模块的电路设计如图5所示。

2.2.2 语音编解码模块
经过A/D转换后的语音信号数据量很大,而CAN通信和WSN通信的带宽有限。因此必须对采集的语音信号进行压缩和编码处理。系统采用的编码芯片为AMBE2000编解码芯片。
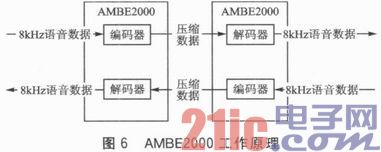
AMBE2000是一种高性能、低功耗、多速率的单片语音编解码芯片,其数据压缩速率在2.0~9.6 kbps范围内可调。AMBE2000将语音数据每20 ms压缩为一个语音数据包并将数据送到MCU,MCU将其中的有用数据送到CAN控制器或无线控制器,以CAN数据或无线数据的形式发送出去。当没有声音信号输入时,它能够检测到静音并写入标志位。在解码器部分,当它检测到丢失一帧语音数据时,它能够依据上一帧数据尽量真实地预测下一帧语音数据,给出适当的语音信号,本系统选用AMBE2000的编码速率为2.4 kbps。AMBE2000的工作原理如图6所示。
2.3 CAN通信模块
CC2530没有集成CAN控制器,本设计选用了带有SPI接口的独立CAN控制器MCP2515,可方便与CC2530连接。本设计选用的是周立功公司的集成光耦、DC/DC隔离CAN收发器的CTM8251,该收发器具有DC 2500 V的隔离功能。CAN通信模块的电路如图7所示。
3 系统软件设计
系统的软件设计采用模块化设计方法,系统的工作流程为:
①模块初始化。模块初始化主要包括CC2530初始化、引脚初始化、无线模块初始化、CAN模块初始化、AMBE2000初始化等。
②正常工作模式。正常工作模式下采用的是CAN通信,因此无线模块处于休眠状态。系统检测通信按钮是否按下,当按钮按下时,启动语音处理及编解码模块,并通过CAN模块发送出去。当CAN模块接收到总线数据时,产生中断,CAN模块接收数据并送到语音处理模块进行解码。
③紧急状况模式。当系统出现异常情况时,会导致电源中断,通信电缆被切断,甚至有些节点遭到损坏无法正常工作。语音节点的无线模块启动,自动进行组网,改为通过无线来传输语音信号。同时在节点遭到损坏的区域,人工布置传感器节点,这些节点与语音节点自组织组网,形成新的无线传感器网络,来恢复和保障语音通信。
由于语音通信对系统的实时性要求比较高,而对传输过程中短暂的丢包和错误具有较高的容错率,因此传统的可靠传输控制协议并不完全适用于语音通信系统。本设计中,采用了一次握手,多个数据连续通信的不可靠数据报文传输机制,来保证语音通信的实时性。
4 系统测试
为了验证系统的语音通信性能,特别是无线语音通信性能,对系统进行了定量和定性两种试验测试。试验设备由语音节点、电源模块、信号发生器、声级计、扫频仪等组成。
4.1 定量试验一
系统试验方法为:两个节点通过无线传输,其中1号节点通过信号发生器输入不同幅值的1 kHz的正弦信号,通过分贝计在2号节点的喇叭正前方1 m处测试语音声强。测试连接示意图如图8所示。

经测试,语音声强可达到85dB,语音失真度小于15%。调节音频信号发生器,使信号频率从350~3 000 Hz变化,测得频响优于±6dB。
4.2 定量试验二
经过定量试验后,再对系统的语音质量进行定性测试。测试方法为:将接收节点固定,对发送节点距离不同情况下的语音音质、语音流畅度的情况进行定性判断。具体测试情况如表1所列。

经过测试,当节点距离在20 m内时,语音流畅、音质较好;在25 m内时开始出现颤音,但仍能满足语音通信的要求;在30 m时,语音质量开始下降;40 m时音质较差,无法满足语音通信要求。因此语音节点布置距离应保证在25 m以内,条件允许时应尽量保证在20 m内为宜。
结语
本文设计的井下语音通信系统,充分结合了有线通信和无线通信的优点,正常情况下采用CAN通信来传输语音信号,保证系统的稳定性和可靠性。紧急情况下采用无线通信来传输语音信号,并且能够通过人工布点的方式接续被破坏的节点,保障紧急情况下的语音通信。通过实验证明了系统声强、失真度、频响等性能指标均符合现场使用的要求,且现场布置时节点间距离以不大于25 m为宜。






















