摘要:RTLinux实时应用程序的开发模式;详细说明两种在实时模块与非实时模块之间进行通信的主要通信接口的实现和使用方式;提出一种将以上两种接口有机结合的实时应用内部通信机制,并通过实验证该方法的可操作性。 关键词:RTLinux 通信接口 实时 共享内存 RT_FIFO 实时性是多任务嵌入式系统的基本特征之一,主要表现为对重要性各不相同的任务进行统筹兼顾的合理调度能力。根据应用系统对时限要求的严格程度又分为软实时和硬实时。 RTLinux作为Linux最为通用的几种硬实时扩展之一,表现了良好的硬实时性。同时,为了更有效地为各种实时应用服务,提供了多种与Linux中非实时进行通信的接口,主要有共享内存、RT_FIFO和线程信号驱动机制,三者的应用重点各不相同。其中前两种较为常用[1]。由于不的实现机理,这两种接口的应用范畴各有侧重。经过实践,笔者认为将以上两种接口有机地结合,利用共享内存传送大容量、对读/写时序要求不高的数据信息;同时,利用 RT_FIFO辅助实现对该共享内存的同步控制,能够综合两者的优势,是RTLinux下一种十分有效的实时应用通信模式。 1 RTLinux的结构和应用程序开发模式 作为Linux的硬实时扩展,RTLinux一个重要的计准则在于:尽可能多地利用Linux内核所能提供的功能[2]。 显示、记录、设备初始化、阻塞式动态资源分配和模块化内核管理等无实时要求或者与硬实时性要求相悖的服务均由Linux提供。RTLinux内核则主要为实时任务提供对硬件的直接访问,使得它们具有最小的延迟和最优先的处理器利用权。
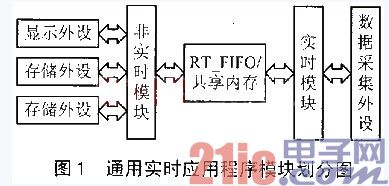
基于以上准则,RTLinux中的实时应用程序开发通常具有一个通用的模式,如图1所示。按照运行环境和对实时要求的严格程度分为实时和非实时两个模块。非实时模块的功能包括结果数据显示。用户交互、数据存储等;实时模块主要负责响应数据采集外设的中断,结果数据的采集。两者通过RT_FIFO或者共享内存进行通信,组成一个完整的实时数据采集程序。 2 RTLinux中的两种通信接口 RTLinux提供了RT_FIFO和共享内存两种标准通信接口,用于实时任务和非实时任务之间的交互。 2.1 RT_FIFO RT_FIFO(First-In-First-Out,先进先出)是一种提案队列机制组织的字符设备。在Linux文件系统中,主设备号为150。一个系统平台中能够同加载FIFO的模块数RTF_NO定义在rt_fifo_new.c中,一般为64,在文件系统中分别对庆设备文件/dev /rtf0..63。在系统资源允许的情况下,一个用户进程所能同时使用的FIFO数和每个FIFO的容量是没限制的。 RT_FIFO具有如下特征: *队列中的数据传送采用数据流形式,必须自行定义数据边界监测机制,尤其对于不定长度数据的传输。 *具备完善的同步阻塞机制,利用同一FIFO进行通信的两进程间无需自行增加同步控制。 *一种点对点的通信通道,不支持单生产者、多消费者的使用模式。 作为一个完善的队列模块,RT_FIFO的使用简便易行,具体实现主要包括创建、读/写操作、释放三个步骤。在Linux文件系统中,RT_FIFO是一个字符设备文件,所以在非实时线程中访问RT_FIFO时,使用标准的字符设备读/写函数即可(read、write、open、close,etc)。以上函数的调用方式均为阻塞式调用:当FIFO中有数据可读时,立即返回;否则,会陷入无限等待之中。 从RT进程中访问RT_FIFO,所涉及到的RTLAPI如下: #include
[创建] int rtf_create(unsigned int fifo,int size); 内核空间中,为编号fifo的RT_FIFO设备分配size字节的缓冲区。fifo对应于所使用RT_FIFO的次设备号。 [释放] int rtf_destroy(unsigned int fifo); 释放内核空间中次设备号为fifo的RT_FIFO设备缓冲区。 注意:以上两个函数涉及到内核空间的缓冲区分配,必须分别在Linux的init_module()和cleanup_module()中调用,或者在用户空间通过PSC(the user-level real-time signal library,用户级实时库函数)进行调用。 [读/写操作] int rtl_get(unsigned int fifo,char *buf,int count); 从FIFO中读出长度为count字节的数据,存放buf之中。 Int rtf_put(unsigned int fifo,char * buf,int count); 将长度为count字节的数据写入FIFO中。 Int rtf_create_handle(unsigned int fifo,int(%26;amp;handler)(unsigned int fifo)); 创建一个回调函数句柄,当FIFO被Linux进程读/写时,被调用。通常与rtl_get结合使用,用于异步的从Linux进程中接收数据,从而避免采用轮询的方式。 2.2 共享内存 共享内存是指被闲置出来专用于内核空间和用户空间进行通信的内存区域。相对于FIFO具有如下特点: *应用程序必须自己定义相应的协议,对于写入共享数据区域的有数据进行保护,如同步控制等。 *数据可以既定格式读/写,各个数据域的更新十分便易。 *不是点对点的通信通道,可以支持多生产者、多消费者的使用模式,能够同时被多个线程访问。
在RTLinux下,共享内存的使用可采用以下两种方式: (1)利用RTLinux中附带的mbuff模块 在使用mbuff之前,要求系统中已经加载了mbuff.o模块。该模块中的两个函数被分别用于分配和释放所需的内存空间。 #include [分配] void * mbuff_alloc(const char * name,int size); 从内核空间中分配一块与name相连,大小为size字节的内存空间,返回地址指针,设备这块空间的引用标识为1。如与name相连的内存空间已经存在,就仅仅返回指向该空间的地址指针,同时将其引用标识加1。 [释放] void mbuff_free(const char * name,int size); 将mbuff的引用标识减1。当引用标识被减为0时,释放mbuff。 注意:①mbuff_alloc使用了vmalloc函数,由于分配内核空间的需要,会交换出一系列的内核空间页面,所以在实时线程、中断处理线程、定时器中断线程中调用这个函数是十分危险的。 ②在进程结束前,一定要调用mbuff_free函数。Mbuff所占内存空间不会因为其引用进程的结束而自行释放。 (2)高地址空间物理内存的直接隔离 在系统启动时,隔离出一定大小的高地址空间物理内存,使其脱离系统运行环境,作为专用的共享内存区域。 图4 共享内存互斥操作流程图 在Linux启动配置文件中,插入一行以append关键字起始的命令行,即可实现高端内存空间的隔离。修改后的/etc/lilo.conf文件如下所示: image=/boot/zImage label=rtlinuxX.X root=/dev/hda2 read_only append=“mem=Xm” 其中,mem的值对应于被隔离空间的起始地址,可以由物理内存总容量减去所需共享空间容量得到。但是必须注意,被隔离出的共享空间的容量必须小于/usr /include/asm/param.h文件中定义的页面长度。Intel Pentium系列芯片的页面长度为4MB。 对共享内存空间的存取操作通过访问其基址来实现。必须首先定义共享内存空间的基址。 #define BASE_ADDRESS(127%26;#215;0x100000) 在实时和非实时模块中有不同的基址访问方法。写时模块运行于内核地址空间,可以直接将基址作为地址指针进行存取,使用语句如下: unsigned short * sharemem; sharemem=(unsigned short *)__va(BASE_ADDRESS); 非实时模块运行于用户地址空间,必须先将该物理地址映射入该进程虚拟地址空间后,才能对其进行存取。使用命令如下: #include #include #include int fd; unsigned short * sharemem; fd=open("/dev/mem",O_RDWR); ① sharemem=(unsigned short *)mmap(0,buflen, PROT_READ|PROT_WRITE, MAP_FILE|MAP_SHARED, Fd,BASE_ADDRESS); ② 注①:访问物理内存必须打开与其对应的设备文件/dev/mem。 注②:mmap命令的作用是将设备文件fd中,从当前进程的虚拟地址空间,其返回值可被非实时进程存取。 以上两种方式在实现机理上的不同之处在于,mbuff利用vmalloc从内核地址空间分配的共享内存空间仅仅在逻辑上连续,空间的大小不受实际物理内存空间的限制;而直接隔离物理内存所获取的缓冲区物理上连续,但是大小受到物理内存空间和当前系统状况的限制。共同之处在于,所获得的内存均被隔离于系统内核的运行环境之外,不会在页面交换中被换出,所以以上两种方法均适用于实时应用之中。 3 两种通信接口的结合 以上两种通信接口具有不同的适用范畴,为了实现一个完整的实时应用,通常需要将两者结合,以一个实时数据采集程序为例,实时模块和非实时模块之间通常需要传送两种类型的数据;结果数据和控制信息。 结果数据:由实时模块周期性产生。非实时模块用于显示和存储,对读/写的时序性要求不高,但是通常需要由多个用户共享,因此,利用共享内存模块传输比较适合。 控制信息:主要用于实现非实时模块和实时模块之间的交互控制,数据量小,但是比较注重信号读/写的时序性和通信过程中实时性,采用RT_FIFO实现比较适合。 图2为通用的抽象数据流图。 3.1 共享内存的内步控制和RT_FIFO的使用 由于对共享内存的存取通过直接访问指针来实现,操作系统不会为其提供任何同步控制,应用程序必须自行提供握手机制,来保证读/写进程之间同步。 实现同步的一种方式是接收方和发送方利用消息通信来实现握手。接收方对共享内存以轮询的方式监测新数据的到来,然后发送接收信息。为了实现握手,发送方对于每条接收消息都必须回复一个确认消息,新的接收消息只有在收到确认消息以后才能发出。
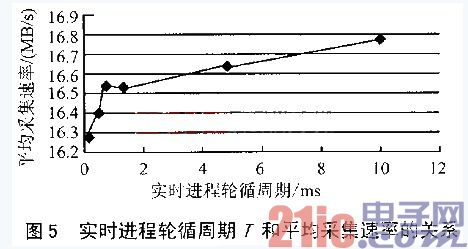
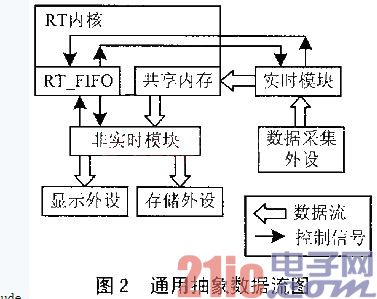
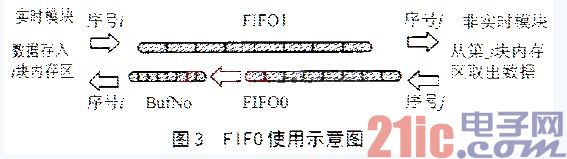
这种方式在实时模块和非实时模块中均须要采用轮询的方式监测新数据和消息的到来,因此会占用较多的处理器资源。所以,可以考虑利用RT_FIFO实现实时模块和非实时模块之间对共享内存的存取同步。利用RT_FIFO所提供的句柄功能能够避免实时模块对接收消息的轮询监测,在一定程度上提高程序运行效率。 具体实现,可以通过利用RT_FIFO实时传输当前所写入或被读出的共享内存块序号,实现实时进程和非实时进程之间的步。因为RT_FIFO是一种单向传输队列,为了实现交互,需要两个传输方向相反的RT_FIFO,连接于两个模块之间,如图3所示。 图3中,BufNo为笔者自行定义的队列。它的使用主要是为了避免由于RT_FIFO引起的实时部分和非实时部分之间的死锁。 实时部分和非实时部分的各线程路之间对共享内存的访问为异步进行;同时,RTLinux中对RT_FIFO的进行读/写的API函数,为阻塞式操作。当 FIFO0中目前没有可读数据时,对rtf_get函数的调用会使程序陷入无限等待之中,很容易造成实时模块和非实时模块之间的死锁。 为了避免这种情况,可以将BufNo作为缓冲区与FIFO0的句柄结合使用,临时存放FIFO0中被非实时线程写入的块序号。实时模块不再对FIFO0进行读/写,而是改由BufNo队列中获取当前有效的共享内存序号。如果当前无可用数据,则进入周期等待状态。 3.2 共享内存访问的互斥 对共享内存访问的互斥操作,包括两个方面:实时模块与非实时模块之间的互斥、非实时模块中各采集线程之间的互斥。 (1)实时模块与非实时模块之间的互斥 多线程之间对共享资源访问的互斥,是操作系统中一个重要的研究分支。但是在实时模块和非实时模块之间,问题变得相对简单。因为,在实时进程和非实时进程之中,实时进程和非实时进程运行的环境区别很大。工作于RTLinux环境下的实时进程具有最高的优先级,不可能被非实时进程中断。所以,在实现互斥时,只须保护非实时进程对共享资源的访问即可。 抽象流程如图4所示。利用共享内存区域的第一个字节作为访问标识,实现非实时模块对实时模块的互斥。 非实时进程开始访问共享区域时,将此标识置位;访问结束时,复位。实时进程在访问共享区域前先检测该标识,如果标识允许访问,则执行写入操作;反之,挂起等待标识位复位,按既定周期T轮询。 实时进程的既定周期T的设置十分重要,周期过长,会增加发生冲突后的等时间,导致共享内存状态改变时,无法被及时写入;周期过短,增加了系统的轮询次数,加重实时系统的负担。笔者在已实现的数据采集程序中,对T的不同设置,所获得的平均数据采集率进行了统计,结果如图5所示。 注:以上实验的测试平台为PentiumIII 667,5400转普通硬盘,RTLinux3.1、Linux kernel 2.4.4,数据流向为数据采集外设至共享内存然后存放硬盘,数据的产生频率为10ms。 (2)非实时模块之间的互斥 非实时模块中异步执行的各采集线程之间,可以利用互斥变量的加锁和解锁实现对共享内存访问的互斥。由于互斥区的执行体内,每次只允许一个线程进入,为了保证程序的执行效率,在互斥区中不宜使用耗时较长或阻塞式调用的函数。 4 结论 在RTLinux提供的实时模块和非实时模块之间的通信接口中,RT_FIFO和共享内存较为常用,分别适用于不同的数据类型通信。本文提出的这种方法,能充分利用两者的优点,方便地实现实时与非实时之间海量数据通信。目前已在rtLinux3.1、Linux kernel 2.4.4系统平台上成功实现,并取得了令人满意的效果。




![志盟嵌入式Linux开发基础[1]Linux基础-第1章Linux系统概述及安装](/Uploads/2014_12/video/vi05a57dd6c3134b9b187fec8642e66c4d_s.jpg)