雷达从体制上可以分为相参雷达和非相参雷达,由于磁控管发射机的起始相位不固定、存在幅度抖动和频率漂移,对接收回波无法做相参积累,所以采用磁控管发射机的雷达属于非相参雷达。而现代信号处理中相参积累可以获得更大的增益和更多的功能,例如成像或动目标检测都需要发射和接收信号具有相参性。因此对原有非相参雷达进行相参改进成为提高雷达性能的关键。
非相参雷达相参化主要是在信号处理部分来实现,这样既可以节约成本又便于改造实现。而信号处理的核心就是数字稳定校正(DSU),DSU的主要作用就是消除发射信号的相位抖动,使接收信号具有相参性。
在数字技术飞速发展的今天,信号处理的硬件实现主要有FPGA和DSP等来实现。大规模可编程逻辑器件FPGA在处理速度和集成度等方面发展很快,用户可自定义逻辑功能、可重复编程,同时FPGA还具有成本低、使用灵活方便等优点,在雷达信号处理硬件实现中得到广泛的应用。由于雷达信号处理数据量大、实时性强、动态范围大和数据精度高,结合片内存储能力本文选用ALTERA公司的StratixⅡ系列芯片。
1 数字稳定校正单元的工作原理
数字稳定校正单元(DSU)的主要作用是实现接收信号的相参处理,DSU是利用发射信号对接收的回波信号进行匹配来获得相参性。DSU工作的原理框图如图1所示。
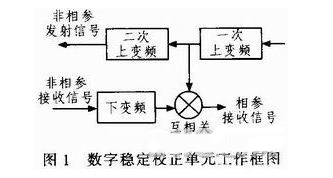
假设这里只考虑脉冲间的幅相不一致,可得发射信号和接收信号的基带形式可以表示为
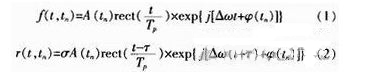
式中:t为快时间表示,tn表示第n个发射或接收脉冲;A(tn)为第n个发射脉冲随机振幅;φ(tn)为第n个发射脉冲随机相位函数;σ为包含传播衰减和目标散射的系数;rect(t/Tp)为发射脉冲矩形包络函数;Tp为脉冲宽度;△ω为雷达发射机自频调系统静差;τ为接收目标回波的延时。
可见DSU利用A/D对发射脉冲样本进行取样,然后用该取样值和回波信号进行相关或卷积来实现相位校正,达到消除随机初相的目的。经后续能量归一可以消除幅度不稳定造成的影响。所以经过DSU处理,可以消除或减小磁控管产生的发射脉冲幅相不稳定性。
2 基于FPGA的DSU实现
由于本雷达信号处理数据量大、实时性强、动态范围大和数据精度高,结合片内乘法器和存储能力本文选一片ALTERA公司的StratixⅡ系列EP2S90 FPGA芯片。StratixⅡ系列的EP2S90器件具有152个接收机和156个发送机通道、支持1Gbps的高速差分I/O信号、具有LVDS、LVPECL和Hyper Transport标准接口、具有9Mbit的RAM存储器、允许设计者将外挂SRAM和DRAM大容量存储器件。
整个处理流程如下:发射脉冲信号在进入信号处理模块后,首先进行A/D采样,对采样后的数据进行正交分解形成I、O两路信号,这里发射脉冲内采样为16个数据,发射脉冲数据在发射样本采样门的控制下分I、Q两路存储到发射脉冲存储区,作为DSU相关的权函数使用,记为fI和fQ;接收回波信号在A/D采样后,经过正交分解形成数据流rI和rQ,然后对接收数据进行相关操作,即回波数据以流水方式通过相关器与发射样本数据逐点进行乘加处理。
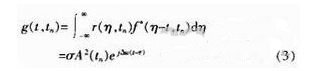
本论文涉及的内容是从发射脉冲信号和接收数据正交变换后的处理过程,即实现接收数据和发射脉冲样本进行相关的操作。DSU处理的计算公式如下: