摘要:导波雷达物位计是一种利用时域反射原理实现的高性能物位计。为了实现导波雷达物位计这一高精度时差测量系统,采用了CPLD和MSP430单片机协同工作的电路设计。CPLD为信号收发模块的核心,为发射电路中提供窄脉冲产生电路的周期触发信号,并在接收电路中控制可编程延时器件AD9500实现等效时间采样,把高频的回波脉冲信号在时间轴上放大为低频信号。以MSP430为核心的信号处理模块根据收发模块传来的信号计算物位,并把物位信息以4-20 mA信号、串口等方式输出,同时MSP430还对液晶屏、按键等外围器件进行控制。实际试验表明系统各模块的工作状态与理论分析相符。
关键词:导波雷达;物位计;等效时间采样;MSP430;CPLD
导波雷达物位计具有受温度、压力、雾气、泡沫及被测介质物理特性变化的影响较小的优点。而且其测量精确,性能稳定。在石化、电力、冶金、等领域得到了广泛的应用,是近年来发展最快的一种物位测量技术。目前已有的导波雷达物位计多是国外进口产品且价格较高,低成本的导波雷达物位计有很大的市场前景。
1 雷达导波物位计的测量原理
导波雷达是非接触式雷达和导波天线结合的产物。它运用了TDR(时域反射)的原理。
图1是导波雷达物位计的测量原理,电磁波发射模块发射窄脉冲信号进入同轴电缆,信号传播到同轴电缆和导波杆的连接处(法兰处)会首先发生断路,一部分信号会反射产生一个顶部回波,其余信号继续沿导波杆传播。当信号与被测液体表面接触时,其阻抗特性会发生变化,一部分信号也会被反射,产生物位回波,此后信号在导波杆的底部断路处还会产生一个能量较小的底部回波。根据传输线理论,顶部回波和底部回波是断路产生的,所以与发射信号同相。一般下层介质的介电常数大于上层介质特性阻抗小于上层,因此物位回波与发射信号反相。
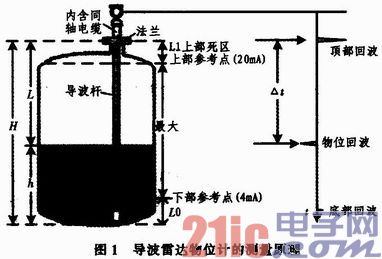
导波雷达物位计通过测量物位回波和顶部回波之间的时间差计算物位高度,物位计的法兰处到被测介质表面的距离L与脉冲在杆上的传播时间△t成正比。设c为光速。罐体高度为H,则物位高度h和△t有如下关系:
![]()
实际上量程的上部和下部都会存在一个非线性特性的测量死区,其长度分别为L0和L1。实际物位h的可靠测量的范围为L0到H-L1。物位为L0时对应的物位计模拟信号输出为4mA,物位为H-L1时输出为20mA。
2 雷达导波物位计系统整体方案设计
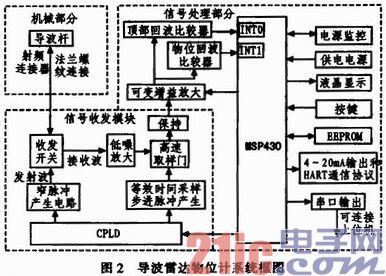
导波雷达物位计由机械部分,信号收发模块,信号处理模块3个模块构成。信号收发模块和信号处理模块两部分的电路设计采用了CPLD和MSP430单片机协同工作的电路设计方案,其中CPLD为信号收发模块的控制核心,MSP430单片为信号处理模块的控制核心。导波雷达物位计的系统框图如图2所示。
3 CPLD为核心的信号收发模块的设计
雷达信号收发模块由可编程逻辑器件CPLD为核心,下面介绍收发模块的工作过程。
CPLD在收到单片机发出测量启动信号后,开始产生2 M的触发方波,触发方波被微分电路微分整形后进入窄脉冲产生电路触发雪崩三极管,产生脉宽约为1~2 ns左右的窄脉冲。脉冲波在法兰处的同轴电缆与导波体的连接处产生顶部回波,在物料界面处产生物位回波。
与此同时,CPLD控制延时芯片AD9500产生2 M触发方波的步进延时方波,方波被微分整形后,产生控制等效时间采样的取样脉冲。取样脉冲整形为正负取样脉冲后,控制高速四管平衡取样门的导通与截止,实现等时间采样。回波信号经过收发开关进入超低噪声精密高速运放LT1 128放大后送入取样门,经等效时间采样和保持后,送入信号处理部分。
3.1 CPLD在发射模块中的应用
如果导波雷达物位计发射脉冲信号的脉宽过宽,将会导致系统的分辨率降低和测量死区的增加。为此需要产生宽度窄、幅度大和重复频率高且波形好的发射脉冲信号。脉冲产生方式主要有气体放电、雪崩三极管和阶跃二极管等,其中用的较多的是雪崩三极管,产生的脉宽可达1~2 ns。
CPLD在发射模块中的主要作用是产生2M的触发方波,该方波经微分整形产生2 MHz周期触发脉冲,处理后可以推动雪崩三极管迅速进入雪崩状态,从而得到需要的周期为2 M宽度为1~2 ns的窄脉冲信号。CPLD产生的方波具有波形好,宽度、频率通过编程可调等特点,很适合本系统。
3.2 CPLD在接收模块中的应用
由于系统采用的窄脉冲信号在空间中传播的速度接近光速,在测量的过程中,窄脉冲信号的行程时间仅为纳秒量级,如果直接测时间差,为了达到需要的物位精度,测时精度要达到皮秒数量级。如果用数字计数法和实时采样法等传统时间测量方式很难满足要求。
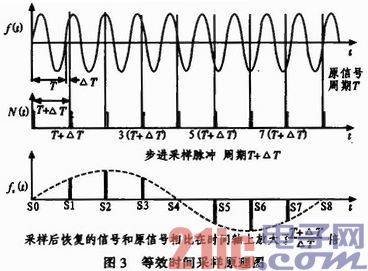
等效时间采样是指对于频率很高的周期性或准周期性被采样信号,可以用较慢的采样频率捕获被采样信号的样本值,然后按照一定的规律重新组合,得到与原信号相似的波形,从而实现利用较低的实时采样速率获取较高的等效采样速率。使用该方法,可以实现窄脉冲在时间轴上的精确放大,对后续电路的要求大大降低。其原理框图如图3所示。由于导波雷达物位计的回波信号为准周期性重复信号,因此可用等效时间采样法来实现导波雷达物位计的回波信号的时间间隔检测。
由等效采样的原理可以知道,采样信号的重复周期与采样脉冲周期之问的差值△t越小,采样的精度就越高。所以产生具有稳定和高精度步进值的采样脉冲信号是关键。这里选择AD公司的8位数字可编程延时器件AD9500,它采用高性能双极型工艺,专为高速电路设计。AD9500的满程缩程延时为2.5 ns~10μs(由外接电阻电容决定),最小延时分辨率更是可达10 ps。只需要提供外部触发信号、锁存信号以及控制步进延时的数字控制字,AD9500就能产生相对于触发信号具有步进延时的脉冲信号。
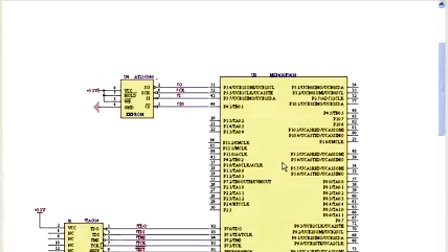
回波脉冲的频率为2 M,周期为500ns,取△t=20 ps,为了把一个周期内的信号采样完整,必须一个周期内实现范围为△t~25 000△t的延时。而AD9500是八位延时芯片只能产生△t~256△t的延时,因此需要采用两片AD9500级连的方式进行扩展,使数字控制位数扩展到16位。图4是CPLD和AD9500的连接示意图,两片AD9500一片产生大延时,一片产生小延时,两者的数字控制位数是高8位和低8位的关系。
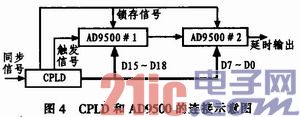
AD9500对控制信号时序的要求较高,使用CPLD可以对AD9500进行较精确的时序控制。CPLD提供AD9500的触发信号、锁存信号以及延时控制字。每完成一次触发延时后,送入CPLD的延时控制字就加1,然后送锁存信号使控制字锁存至AD9500内部,等待下次触发到来。要注意保证锁存信号与触发信号同频率,且必须在触发信号产生后产生。
4 MSP单片机为核心的信号处理模块设计
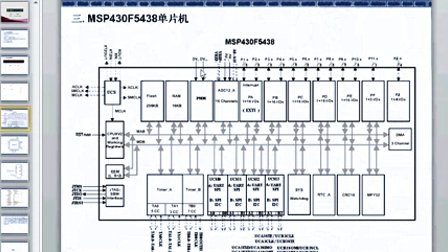
TI公司的MSP430单片机作为一种低功耗的16位单片机,在智能仪表中应用广泛。这里选用MSP430F149单片机作为信号处理模块的控制核心。下面分模块介绍信号处理模块的电路和软件设计。
4.1 物位测量模块电路设计
导波雷达物位计在进行物位测量时,收发电路发射的脉冲信号的幅值是一个固定值。而从介质液面反射的回波信号的幅值大小会受介质的介电常数、导波杆杆长等很多因素的影响。因此反射得到的回波信号的幅值会有大有小。在不同的使用工况下,需要把回波信号进行放大处理,便于后续的比较电路进行处理。这里选用低噪声可变增益放大器AD604,它的增益由VGE引脚的输入电压确定。单片机控制八位高速DAC TVL7524控制VGE引脚的输入电压,从而控制AD604的增益。
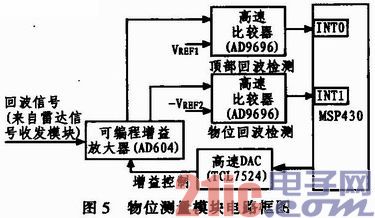
图5是物位测量模块的电路框图。在雷达信号收发模块中,回波信号经过等效时间采样和保持,已经变为较低频率的信号,信号在进入可变增益放大器放大后分为两路,分别进入顶部回波比较器和物位回波比较器(反相比较),比较器芯片选用超高速比较器AD9696。比较产生的脉冲进入MSP430单片机的不同引脚,单片机的内部计时器计算两者之间的时差,并根据其他参数计算时差对应的物位值,多次计算后进行数字滤波得到一个稳定的物位值。
4.2 电源电路设计
系统中要用到多种电源,这里选择AD421作为电源转换芯片。AD421是一个16位4~20mA电流输出DAC。同时当外部电源给AD421提供+24 V的电压时,AD421芯片有3个输出引脚可分别输出+5 V、+1.25 V、+2.5 V的电压,所以它同时是一个智能仪表中常用的电源转换芯片。
MSP430的工作龟压范围为+1.8~+3.6 V,采用低功耗电压调整器HT7133把AD421输出的+5V电压转换为+33V。电路中还要用到到负电源,采用负电源转换芯片TP7660把+1.2~+8 V的电压转换成相应的-1.2~8 V输出。
4.3 通信电路设计
单片机的3个IO口和AD421通过同步串行接口相连,实现物位计4~20 mA输出的功能。单片机物位信息经过计算,转化为相应的电流值对应的数字量传给AD421,AD421会输出对应的4~20mA电流。
物位信息还可通过MSP430单片机内部集成的通用串行输出,串口可连接上位机软件实现物位趋势图显示等功能。
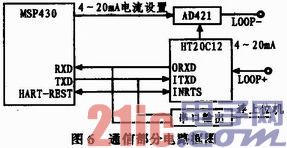
此外系统还可扩展HART总线传输液位信息,HART总线是一种兼容4~20 mA信号的通信总线,在智能仪表行业中使用广泛。HART通信协议采用在4~20mA模拟信号上叠加0.5 mA的FSK(频移键控)信号进行通信,由于FSK信号平均值为零,所以不会对模拟信号产生影响,这里采用低功耗芯片HT20C12和单片机的串口相连来实现HART信号的调制和解调。图6是系统通信部分的电路框图。
4.4 人机接口电路设计
导波雷达物位计作为一台智能仪表,需要有良好的人机接口,从而实现显示物位信息和查看修改参数的功能。显示部分选用了性价比较高的5110液晶模块,它是84x48的点阵LCD,可显示两行汉字。导波雷达物位计需要对系统参数进行设定,共设计了6个按键,分别代表左、右、改数字、确定、取消和复位。过这些按键配合LCD显示能够方便的完成各参数的设定。
4.5 MSP430单片机的软件设计
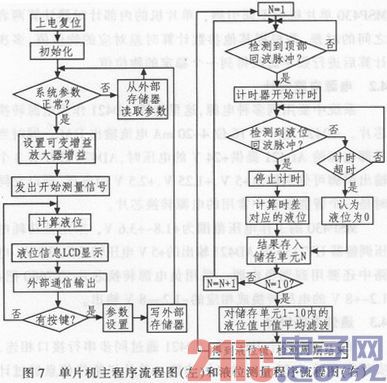
MSP430单片机的软件设计在IAR EW for MSP430编程环境下进行。程序设计中充分考虑到了仪表的低功耗和高稳定性的要求。图7为单片机的主程序漉程图和程序中液位测量部分的流程图。
5 系统测试试验
为了验证上述电路设计的可行性,我们对电路进行了制板,并把仪表厂家提供的机械部分和我们的电路部分相连进行了初步的验证试验。试验在常温下的实验室环境下进行,被测液体为水(介电常数约为81.5)。
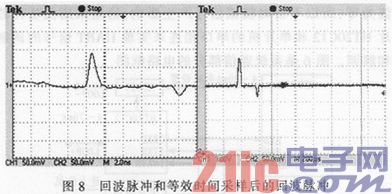
图左边中在电路板与同轴电缆SMA接头处测得回波脉冲,图中可以清楚的看到顶部回波和物位回波的波峰。两者的脉宽都约为2ns,波峰之间的时间差为8.3ns。考虑到示波器的误差,8.3ns的时间差对应的法兰到液位表面的距离应为1.245±0.15m和实测的1.26m相符。右边为等效时间采样后的回波脉冲,两者波峰之间的时间间隔约为215μ,在时间轴上放大了2.59x105倍和理论值2.5x105倍相符,这说明等效时间采样实现了高频信号在时间轴上的放大。当MSP430单片机设置罐高为6 m时,液晶显示的液位高在4.730~4.746m之间,和理论值的4.74m误差小于0.01 m。
6 结论
导波雷达物位计采用了CPLD加MSP430的电路设计方案。因为信号收发部分属于高速电路,对波形时序的要求较高,所以选用了可编程逻辑器件CPLD。而信号处理部分的计算任务较重,因此选用了处理能力较强的MSP430单片机。两者协同工作优势互补,实现了高精度的时差测量系统,和其他方案相比有较高的性价比和可靠性,实现了较高的测量精度。