1 引言
GPS 系统由多颗卫星组成,运行在受大气影响甚微的高轨道上,可以用来授时、测距、测量位置、测量运动载体的速度及方向。如今GPS 接收设备的应用已经很广泛,但一般都是单个GPS 接收设备工作,只有在一些专业设备上才采用多个GPS 接收设备协同工作,以获取高精度的位置、速度、方向等。但这些设备都很专业,价格昂贵,一般人很少有机会接触和使用。本文中讨论一种简单易行,低成本的多GPS 接收设备协同工作,以获取载体在运动状态中方向的定向仪的实现。
2 GPS 定向
GPS 可以用来确定运动载体瞬时速度的大小及方向,其原理是利用多普勒原理使用无线电信号来进行测定。由于卫星与运动的载体之间存在相对运动,根据多普勒频移原理,卫星播发的信号频率在运动载体接收时会产生频移,通过观测这个频移量可得到速度的数值及方向。
市面上常见的普通GPS 都支持NMEA 数据通讯协议,所谓“NMEA 协议”是由美国国家海洋电子协会(NMEA- The National Marine Electronics Association) 制定的一套通讯协议,是为了在不同的GPS 导航设备中建立统一的BTCM(海事无线电技术委员会)标准。GPS 接收设备根据NMEA- 0183 协议的标准规范,将位置、速度等信息通过串口传送到PC 机、PDA 等设备。
NMEA- 0183 协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有$GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG、$GPGLL 等,其中,我们只给出重点使用的常用NMEA- 0183 语句的字段定义解释:
(1)$GPGGA:包含当前点位的位置信息
例:$GPGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1F
字段0:$GPGGA,语句ID,表明该语句为Global PositioningSystemFix Data(GGA)GPS 定位信息
字段1:UTC 时间,hhmmss.sss,时分秒格式
字段2:纬度ddmm.mmmm,度分格式(前导位数不足则补0)
字段3:纬度N(北纬)或S(南纬)
字段4:经度dddmm.mmmm,度分格式(前导位数不足则补0)
字段5:经度E(东经)或W(西经)
字段6:GPS 状态,0= 未定位,1= 非差分定位,2= 差分定位,3= 无效PPS,6= 正在估算
字段7:正在使用的卫星数量(00 - 12)(前导位数不足则补0)
字段8:HDOP 水平精度因子(0.5 - 99.9)
字段9:海拔高度(- 9999.9 - 99999.9)
字段10:地球椭球面相对大地水准面的高度
字段11:差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)
字段12:差分站ID 号0000 - 1023 (前导位数不足则补0,如果不是差分定位将为空)
字段13:校验值
(2)$GPVTG:包含速度及方向信息
例:$GPVTG,89.68,T,,M,0.00,N,0.0,K*5F
字段0:$GPVTG,语句ID,表明该语句为Track MadeGood and Ground Speed(VTG)地面速度信息
字段1:运动角度,000 - 359,(前导位数不足则补0)
字段2:T= 真北参照系
字段3:运动角度,000 - 359,(前导位数不足则补0)
字段4:M= 磁北参照系
字段5:水平运动速度(0.00)(前导位数不足则补0)
字段6:N= 节,Knots
字段7:水平运动速度(0.00)(前导位数不足则补0)
字段8:K= 公里/ 时,km/h
字段9:校验值
本文中讨论的定向仪就是使用上述信息来实现定向的,具体实现原理如下所述。将两个GPS 接收设备安放在一定长度的刚体上即可进行该刚体的定向,例如图1 中为了测定船载航行时窗体的航行而分别在船头和船尾放置了GPS 接收设备:
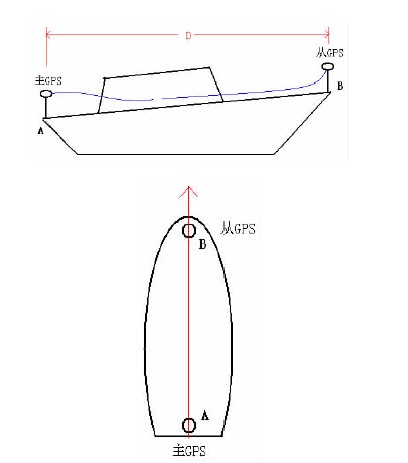
图1 定向仪的使用
当船体运动时,由于主GPS 设备与从GPS 设备都可以得到各自的速度大小及方向,所以可以求出船体的运动状态,如图2 所示,由于GPS 设备可以获取A 点及B 点的瞬时速度及方向,而船体可以视为刚体,则可以得到与真北方向或者磁北方向的夹角α、β(可以选择真北也可以选择磁北,不过A、B两点要统一),将角度与方向分解在北向和东向上,叠加解算后即可得到船体的运动状态:
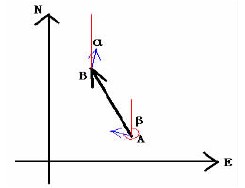
图2 船体运动状态的计算
3 GPS定向仪的实现
如图3 所示,GPS 定向仪由GPS 卫星信号接收天线、天线连接电缆、GPSOEM板卡、单片机组成,其中供电电源为12VDC 蓄电池:

图3 GPS定向仪硬件组成
其电路原理如图4 所示:
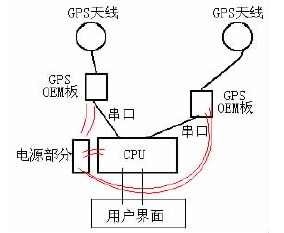
图4 电路原理
其中,A、B 两个GPS 设备把数据输出到CPU,CPU 通过软件计算出当前的姿态后实时的通过用户界面显示给用户。
4 结论
本文中讨论的简易GPS 定向仪,不需要使用专业GPS 设备,而通过简单易行的方法和解算即可得到载体的运动状态,当主从GPS 设备间的距离大于1 米后,精度会随着它们之间距离的增加而有所提高。事实上,这个方法如果将GPS 设备升级为带有载波相位输出的专业GPS 测量设备,并且将主从GPS 设备间的距离作为已知条件进行静态高精度基线解算的话,可以把定向仪的精度明显的提升到专业设备的水准,与目前市面上的专业定向、定姿态设备的原理是相同的。