由于雷达探测存在盲区,低空与超低空飞行的入侵目标给雷达防御系统带来困难与威胁。基于GPS技术、多传感器技术、网络技术及单片机技术设计出一种分布式多传感器探测节点,把远程分布的多传感器探测节点所探测到的信息实时、有效地汇集在一起,实现超远距离的多传感器信息融合,实时进行目标发现,可弥补雷达防御系统存在的漏洞,有效地杜绝雷达防御系统存在的安全隐患。
1 引言
由于电磁波是沿直线传播的,受地球曲率的限制以及山地的影响,使雷达探测产生盲区, 看不到低空与超低空飞行的目标,所以低空目标给雷达探测带来困难与威胁。为了及早地发 现和探测中、低空,特别是超低空高速入侵的*、武装直升机等,就要解决远程探测 目标的问题。目前主要采用发展低空补盲雷达、采用升空平台监视雷达系统(如空中预警机 系统、系留气球载雷达系统、飞艇载雷达监视系统等)、改进和提高雷达的低空探测性能等 几种措施,提高雷达对空、对海警戒的作用距离[1]。这些措施有效地提高雷达对空、对海警 戒的作用距离,但造成了防御成本的大规模增加、雷达载体目标暴露易遭受对方的攻击等, 同时仍然存在着探测盲区,使安全防御系统存在一定的隐患。
针对以上问题,本文提出利用MSP430F133嵌入式微处理器设计出一种分布式多传感 器探测节点,可随机地分散地设置在雷达系统探测的盲区,利用GPS 系统授时和定位、利 用多传感器提供观测数据、利用GPRS 网络和互联网进行多传感器信息融合,实时进行目标发现、优化综合处理,获取状态估计、目标属性、行为意图、态势*估、威胁分析和辅助决 策等,可弥补雷达防御系统存在的不足之处,杜绝安全防御系统存在的隐患[2-4]。
2 分布式多传感器信息融合系统总体框架
整个分布式多传感器信息融合系统由若干个不规则分布的多传感器探测节点、 INTERNET 网络、监控中心服务器、交换机、数据库服务器、应用服务器、多传感器信息 融合终端和探测节点控制终端等组成,其总体结构如图1 所示。
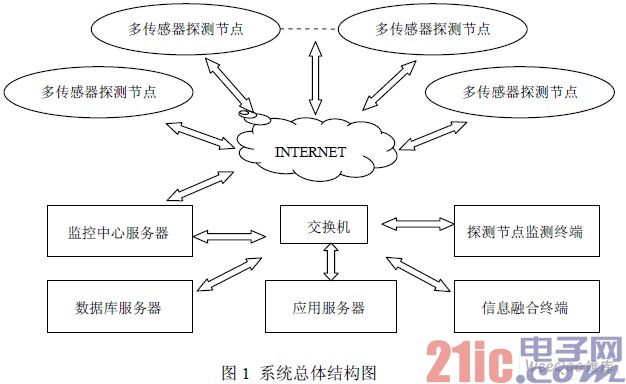
当探测目标进入到多传感器探测节点所能够探测到的区域内,探测节点通过通信模块 (GPRS 模块)把传送数据分组,无线传送到GPRS 网络,再经INTERNET 网把数据传送 到监控中心服务器上。
监控中心服务器实时接收各探测节点传递过来得信息,并通过交换机与数据库服务器、 应用服务器、多传感器信息融合终端和探测节点控制终端进行数据交换。
信息融合终端对监控中心服务器收到的数据进行处理并通过其它服务器进行数据交换 实现信息融合,实时进行目标发现、优化综合处理,来获取状态估计、目标属性、行为意图、 态势*估、威胁分析和辅助决策等。
探测节点控制终端传送各种指令到各探测节点,监测各探测节点的运行状况,并对各探 测节点进行实时控制。
布式传感器探测节点硬件部分主要由通信模块(GPRS 模块)、GPS 模块、存储模块、 电源模块、时钟模块、复位模块、各种传感器和嵌入式微处理器组成,其硬件结构如图2 所示。
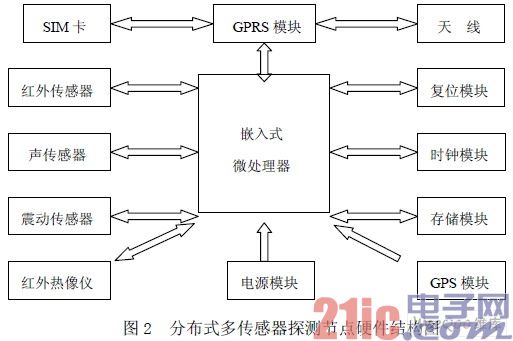
微处理器选择德州仪器公司生产的 16 位单片机MSP430F133,芯片处理能力强、运行 速度快,采用了JTAG 技术、FLASH 在线可编程等先进技术。其片上资源丰富,含有8KB FLASH 存储器,并含有UART 接口,可用于异步或同步通信,同时还可通过Timer-A 软件实 现串行通信。
通信模块即 GPRS 模块,采用索爱公司生产的GR47,该模块内嵌TCP/IP 协议,支持SMS、GPRS、CSD 等传输方式,并提供SIM 卡接口和三路串行数据通信接口(UART1、 UART2 和UART3)。模块支持AT 命令集,有命令状态和在线状态两种工作状态,处于命令 状态时,模块接收MCU 通过串口发送的指令;处于在线状态,即数据模式时,可进行数据 传输,此时不响应命令,直接传送所接收到的数据。该模块体积小,开发简便,内嵌TCP/IP 协议栈,使用户不用自己开发复杂的TCP/IP 协议栈软件,大大降低了开发难度,也最大程 度上缩短了产品的研发周期。该模块需要一张开通GPRS 业务的SIM 卡,和它配套使用。
存储模块采用 24C256 存储器,保存一些重要的数据,这些数据在系统掉电后是不能丢 失的。主要存储探测中心IP 和端口号、口令、采集数据等。 电源模块是采用太阳能电池并加以备用的锂电池,电源部分通过加一些必要的滤波及电 压转化电路,来最终输出24V、12V 和5V 的3 组直流电,供各个传感器和微处理器等部件 使用。
GPS 模块利用GPS 系统对分布的多传感器探测节点进行授时和定位,在确定各探测节 点准确位置的同时,保证各探测节点的时间的高度一致。
传感器部分根据不同的应用环境分别动态地设置相应的传感器,高可靠性地完成目标的 探测、发现、识别、定位及图像拍摄等。随着反侦察技术的发展,单一的传感器探测很难有 效地探测到目标,必须使用多传感器进行探测。在几百米以下的超低空领域,通过红外传感 器、声传感器、震动传感器等基本可以有效地探测和识别进入该区域的目标,通过红外热像 仪等摄取图像,以便更准确地判断目标,更好地进行信息融合。
4 分布式多传感器探测节点的软件设计
软件部分主要由多传感器数据采集和GPRS 远程数据通信两部分组成。多传感器探测数 据采集及处理部分实时探测和识别该区域的目标信息,经过微处理器转化成相关传送数据; GPRS 远程数据通信部分实时通过GPRS 与监控中心服务器进行通信。
4.1 多传感器探测数据采集及处理
多传感器探测数据采集是指在探测节点运行的一个采集周期内,红外传感器、声传感器、 震动传感器等输出的AD 转换值。微处理器对采集的数据进行预处理,如果发现可疑的目标 信息,启动红外热像仪摄取目标图像,随后将采集的所有参量及图像数据传送到监控中心服 务器。
在数据传送过程中,由于各项参量数据不是独立传送的,所以首先要采用TLV(标识、 长度、数据)的格式对所有的数据按顺序进行编码打包。然后,再以固定的长度对打包好的 数据进行分块,分块的目的是保证每次送入网络的数据长度适中,易于网络传输。之后再调 用数据传输子程序把每块数据顺序发送出去。
在数据传输子程序中,原始数据块依次由应用层数据传送命令报文、传输层 UDP 包、 网络层IP 包和链路层PPP 帧报文进行封装,然后送入GPRS 模块,发送到网络中。传输层采用了UDP(用户数据报协议) 协议,该协议是一种面向无连接的传输协议,其本身没有应 答机制和命令重发机制,属于小的、节约资源的传输层协议, 传输速度快。而我们在应用层采用了应答和重发机制,所以 可以确保数据被收到。网络层则采用IP 协议,IP 头里包含 了本机IP 地址和监测中心IP 地址,指出了数据的传送路径。
4.2 GPRS 远程数据通信
使用GPRS 模块上网进行数据传送,一般具有三种方式, 一是采用公网静态IP,连接操作较简单,具有较高的可靠性 和稳定性,但是静态IP 的申请和使用需要较高的费用;二 是采用动态IP 结合DNS 域名解析的方式,每次上线的IP 可能不同,但可以通过DNS 动态域名解析在终端与后台之 间建立关联;三是采用APN 专线接入方式,通过申请APN 专线接入GPRS 网络,然后给每个模块分配固定IP,组成一 个私有广域网,这种方式也需要较高的费用。
本系统采用了第二种方式获得本身 IP,而后台监控中心 服务器的IP 是固定的。采用GPRS 模块上网时,GPRS 模块 首先完成拨号登陆,然后进行数据传输。实现动态IP 方式 上网通信的处理流程如图3 所示。

5 结束语
本文创新点是:利用GPRS 网络作为远程无线数据通信平台,可充分发挥通用无线分组 业务数据传输的优势,把远程分布的多传感器探测节点所探测到的信息实时、有效地汇集在 一起,实现了超远距离的信息融合,可实时进行目标发现、优化综合处理,获取状态估计、 目标属性、行为意图、态势*估、威胁分析和辅助决策等。
![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)


























