一般来说,LCD 模块的控制都是通过 MCU 对 LCD 模块的内部寄存器、显存进行操作来最终完成的;在此我们设计了三个基本的时序控制程序,分别是:
写寄存器函数(LCD_RegWrite)
数据写函数(LCD_DataWrite)
数据读函数(LCD_DataRead)
这三个函数需要严格的按照 LCD 所要求的时序来编写,下面可以看看 MzL02 模块时序图:
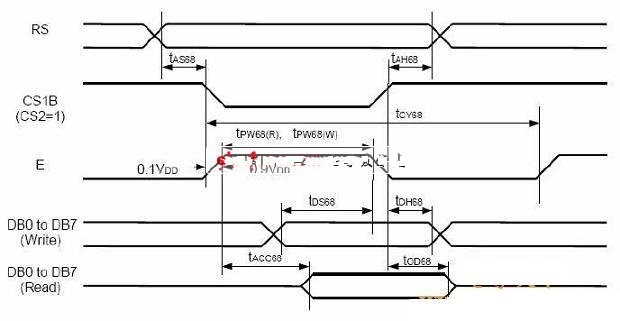
图 3.2 MzL02 模块的 6800 时序示意
注意:上图是该模块的控制 IC 资料中的原版时序图,其实有些示意不是太稳妥(少标出了RW 线信号的要求),或者说是不太严谨,不过这些不作讨论,请看分析即可;而 EP 的有效触发沿在图中很有可能示意有误,实测为上升沿。图中 CS1B(CS2)的信号即为片选 CS,RS 即为数据/寄存器的选择端口 A0 信号,E 为 EP;当作写入寄存器数据操作时,首先要将 A0 置低,以通知 LCD 模块即将进行的是对寄存器的操作;而 RW 线需要置低,以示即将要进行的是写入的操作;然后片选 CS 信号置低,装载数据至总线,然后在 EP 线上产生一个上升沿以触发 LCD 模块将总线上的数据最终载入;在前面的操作完成后一般都会将各个信号线的状态恢复。而数据(显存)写入、数据读出的操作时序也比较类似,这里就不多作介绍,直接参考例程即可。
//=======================================================
// 函数: void LCD_RegWrite(unsigned char Command)
// 描述: 写一个字节的数据至 LCD 中的控制寄存器当中
// 参数: Command 写入的数据,低八位有效(byte)
// 返回: 无
//======================================================
void LCD_RegWrite(unsigned char Command)
{
LCD_A0 = 0; //A0 置低,示意进行寄存器操作
LCD_RW = 0; //RW 置低,示意进行写入操作
LCD_EP = 0; //EP 先置低,以便后面产生跳变沿
LCD_CS = 0; //片选 CS 置低
DAT_PORT = Command; //装载数据置总线
LCD_EP = 1; //产生有效的跳变沿
LCD_CS = 1; //片选置高
}
数据写入以及读出的函数源码如下:
//==========================================================
// 函数: void LCD_DataWrite(unsigned char Dat)
// 描述: 写一个字节的显示数据至 LCD 中的显示缓冲 RAM 当中
// 参数: Data 写入的数据
// 返回: 无
//==========================================================
void LCD_DataWrite(unsigned char Dat)
{
LCD_A0 = 1; //A0 置高,示意进行显存数据操作
LCD_RW = 0; //RW 置低,示意进行写入操作
LCD_EP = 0; //EP 先置低,以便后面产生跳变沿
LCD_CS = 0; //片选 CS 置低
DAT_PORT = Dat; //装载数据置总线
LCD_EP = 1; //产生有效的跳变沿
LCD_CS = 1; //片选置高
}
//=========================================================
// 函数: unsigned char LCD_DataRead(void)
// 描述: 从 LCD 中的显示缓冲 RAM 当中读一个字节的显示数据
// 参数: 无
// 返回: 读出的数据,
//==========================================================
unsigned char LCD_DataRead(void)
{
unsigned char Read_Data;
DAT_PORT = 0xff; //51 的端口想要输入前,要先给端口全置 1
LCD_A0 = 1; //A0 置高,示意进行显存数据操作
LCD_RW = 1; //RW 置高,示意进行读出操作
LCD_EP = 0; //EP 先置低,以便后面产生跳变沿
LCD_CS = 0; //片选 CS 置低
LCD_EP = 1; //产生有效的跳变沿
LCD_EP = 0;
Read_Data = DAT_PORT; //读出数据
LCD_CS = 1; //片选置高
return Read_Data; //返回读到的数据
}
以上便是要介绍的最基本的时序操作程序,它们几乎是整个 LCD 驱动程序当中与底层硬件打交道的代码了,这样的话,当要改变驱动 LCD 的 MCU 端口时或者换用别的 MCU 来驱动 LCD 时,基本上只需要在这些代码里作一下修改即可。
关于读 LCD 状态
而在一般的 LCD 模块当中,还有一个功能同样重要,就是读 LCD 状态;可以通过此操作获取当前 LCD 模块的忙状态以及一些相关的状态信息,当 LCD 模块正处于忙状态时,则不宜对它进行数据的写入或读出操作(有很多较老式的 LCD 控制器规定在忙的状态下时不允许写入或读出数据)。
所以在很多 LCD 的驱动程序当中,会在寄存器写入、数据写入/读出的操作前加入读取 LCD状态并判别忙状态的代码;这点可以参考网上流传的很多 LCD 驱动程序。不过,对于 MzL02这样的较新出的 LCD 控制器来说,已经对忙状态不是很在乎了,或者说影响已经很小甚至没有了;所以我们在前面的代码当中并没有加入这样的代码。至于有没有必要加读状态判忙的代码,要视具体的 LCD 控制器而定。
关于时序的时间要求
时序的一个非常重要的数据就是类似上图中标出的tAS88之类的时间长短要求,只是上图中并没有标出它们的具体最大最小值要求而已;但在编写这类的时序接口程序时它们还是非常重要的,当然还要看 MCU 的端口操作速度以及 MCU 的指令执行速度。打个比方,有的时序里就会有要求某些信号的电平保持最小宽度,而如果 MCU 的指令执行速度以及端口操作速度非常快的话,就需要酌情在连续操作端口的代码之间加入适量的延时(通用用空操作来代替,具体多少个多少时长视具体的 MCU 以及 LCD 控制器而定)以保证该信号的脉冲宽度满足要求。