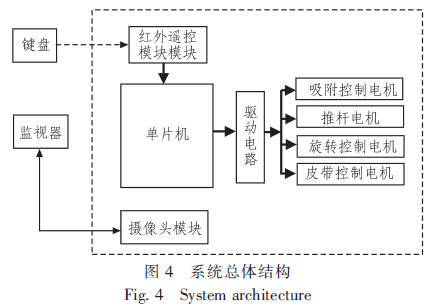
为了提高储油罐壁检测作业的机器人负重能力,设计了一种变磁力吸附多足爬壁机器人。该爬壁机器人由运载平台、控制系统和摄像模块组成。运载平台采用变磁力吸附方式的四足结构;控制系统对爬壁机器人的各分系统进行协调和控制,同时完成各系统状态监视和显示;摄像模块主要采集油罐壁面图像。应用表明多足爬壁机器人满足负重作业、吸附可靠的要求。
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
深入浅出玩转STC15单片机-第11讲_模块化编程实例介绍
深入浅出玩转STC15单片机-第17讲_数码管驱动器件74HC595的介绍
ASR M08-A语音识别控制模块 语音控制单片机
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
郭天祥PIC单片机视频教程lesson1_1
x