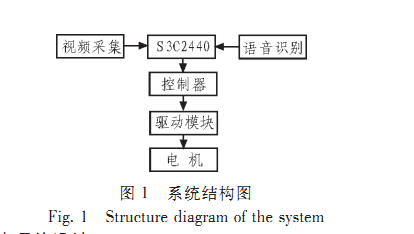
针对目前机器人技术普遍存在的成本高、功耗大、实时性差的缺点,采用性能高、成本低、功耗低的S3C2440芯片作为核心处理器,移植实时性较高的Linux操作系统,以增强系统的实时性和可靠性,实现机器人的精确实时控制。并通过设计视频采集模块、语音识别模块、无线传输模块等功能模块,使系统具有实时监控、语音控制、无线传输等功能。
朱兆祺ForARM-51单片机教程-第17课-LCD12864菜单(上)
朱兆祺ForARM-51单片机教程-第4课-单片机介绍
第2集--认识ARM--刘凯老师STM32培训视频
12864液晶程序设计及简单的GUI建立
嵌入式视频教程50—Qt/Embedded开发模型
Linux高级程序设计09.01Linux进程与信号处理策略
第4课 MMU实验
x