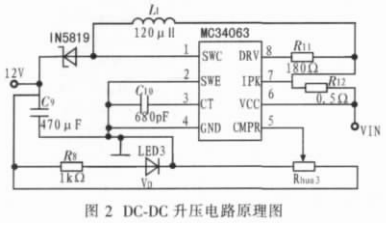
以“飞思卡尔”杯智能车大赛为研究背景,采用 MC9S12XS128 作为核心处理器,通过对比各个模块不同设计方 案的性能,完成智能车电源、驱动、图像采集、测速等模块的设计与实现。 通过大量的实验调试完成了智能车的组装与 机械部分调整,使得智能车结构更为合理。 实验及实际比赛表现表明,该智能车硬件结构稳定,性能良好。
EasyEDA1.2电路原理图、spice及PCB设计主界面介绍
第十二节:K60的定时器PIT、LPTMR、SysTick讲解
第十七节:K60的USB虚拟串口讲解
第十三节:用K60的DMA进行摄像头采集
第九届飞思卡尔智能车华南赛区-东道主武汉理工大学的光电小车
第一节:飞思卡尔智能车K60入门介绍
第七届全国大学生“飞思卡尔”杯智能车竞赛浙江赛区摄像头组
007.飞思卡尔智能车——OLED
x