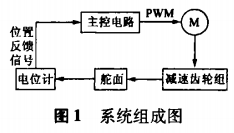
高性能无人机舵机伺服控制系统的研制为背景,介绍了一种基于PIc单片机的高精度伺服控制系统。以PIc单片机为控制芯片产生PwM信号.控制功率驱动电路,驱动直流电动机,实现伺服控制系统。软件采用位置、速度和电流三闭环控制算法,利用模糊控制算法对位置环的PID参数进行实时调整,同时在速度环与电流环中使用积分分离的PI控制算法。实验结果表明,系统具有强抗干扰、响应速度快、可靠性高等特点。
[郭天祥十天学会PIC单片机]lesson12-1—I2C串行通信模块
[郭天祥十天学会PIC单片机]lesson12-2—I2C串行通信模块
我的PIC日记02A PIC的开发环境
[郭天祥十天学会PIC单片机]lesson7——定时器0
[郭天祥十天学会PIC单片机]lesson1-1—PIC单片机简介
[郭天祥十天学会PIC单片机]lesson1-2—PIC单片机简介
[郭天祥十天学会PIC单片机]lesson10
5 郭天祥十天学会PIC单片机
x
![[郭天祥十天学会PIC单片机]lesson12-1—I2C串行通信模块](/Uploads/2014_12/video/vicf66f18ba6fceaebce3da8440889b95c_s.jpg)
![[郭天祥十天学会PIC单片机]lesson12-2—I2C串行通信模块](/Uploads/2014_12/video/via15f455639919c9fc8a4a975a8081c80_s.jpg)
![[郭天祥十天学会PIC单片机]lesson7——定时器0](/Uploads/2014_12/video/vi5ed272851e04968518281eeb852ea388_s.jpg)
![[郭天祥十天学会PIC单片机]lesson1-1—PIC单片机简介](/Uploads/2014_12/video/vi4b9a970eb7c588e68e43ad74f603acc6_s.jpg)
![[郭天祥十天学会PIC单片机]lesson10](/Uploads/2014_12/video/vi3ef3b4fd54e99ba0e41deaf768b18147_s.jpg)