基于多超声波传感器的移动机器人目标识别.pdf
时间:11-08 10:33
查看:1787次
下载:162次
简介:
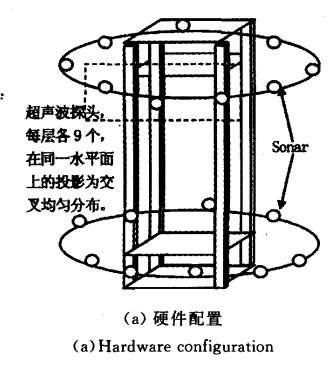
机器人在不确定环境中的目标识别技术是自主导航及复杂任务分解的一项关键技术.本文利用自行设计的多超声波传感器探测系统感知外界环境,提出了基于目标原型的目标识别和对感兴趣目标的主动探测方法.根据多超声波传感器的TOF(Time—o&Flight)信息,利用Dempster—Shafer证据理论,实现了移动机器人对室内特征环境的准确识别.测试结果及分析验证了该方法的可行性和识别准确性.并且该方法适用于室内机器人运动中的实时探测.