步行机器人的行走控制.pdf
时间:11-11 09:38
查看:1379次
下载:162次
简介:
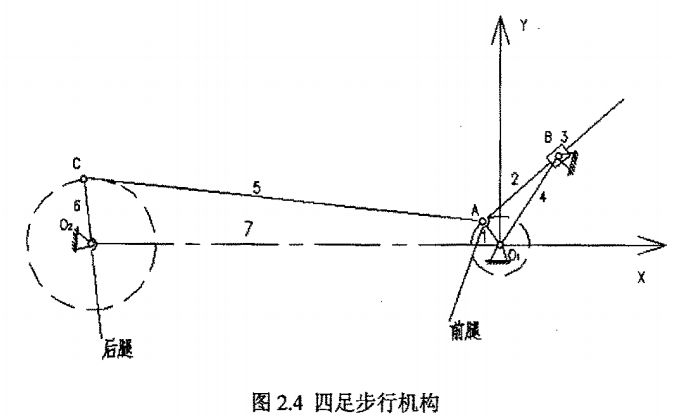
本文通过大基的资料查阅和观察、试验的方法,对双足、四足、六足步行机器人展开了研究。从仿生学的是度研究了各种步行机器入的步态鄹体态,并设计四鼹步行机构。针鼹瑗有多是穰辫入多采蔫嚣l牲疆壤棱,本文提毫缓游憝爨梅。瑷毒蕊久凝嚣久多数窜袋瓤构为主,本文程分析各并联机构的饿髓图谱的基础上,提出了串并联结合的仿人机器入机构,进行了自由度的合理分配和关节并联机构的选型,弗进行了运动学建模和分析。基于zMP理论,本文提出了仿人机器人的稳定性模糊控制系统,使用MATLAB对其进行了仿
真。