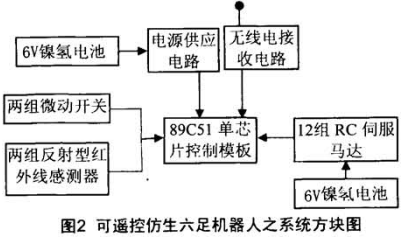
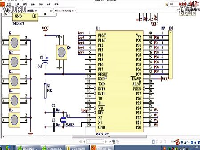
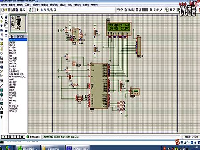
自然界中的生物以其丰富的型态、灵巧的动作与神奇的功能,而能在复杂多变的环境下生存F来。仿生机器人就是模仿自然界中生物的外部形状或某些机能的机器人系统。六足仿生机器人其有平衡安定之优点,它也是一个研究步态行走理论的机器人模型。本文所研制之六足机器人是由12个辅确的微型RC伺摄马达所操控,它们可控制6条腿,每条腿有永平旋转及垂直升降2个自由度(Do F)。透过89C51单芯片对12个伺服马达的精确控制,可模拟及研究六足动物的行走步态。六足机器人有遥控及自走功能,遥控功能是利用无线电来遥控六足机器人进行前进、后退、停止及左右转弯等动作。自走功能则是利用六足机器人前方所装设的微动开关及反射型红外线传感器来侦测障碍物.若干_避问遇到障碍物时则进行转弯避障等动作。