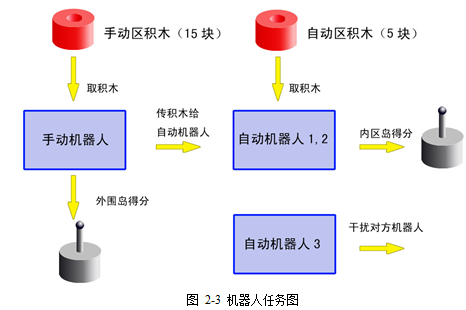
本文根据ABU2007机器人大赛的规则要求,对机器人的控制系统和调试方法做了比较深入的探索,并实际完成了所有机器人的软件控制系统。机器人采用了TI公司的TMS320LF2407A作为核心控制器,使用EP1C3T144C8作为外设控制器,很好地解放了核心对外设的接口控制,使得DSP能够更加高效地用于定位计算。本文成功解决了机器人导航过程中的定位、累计误差修正、路径规划以及避障等问题,使其运动多线多样化,提高了机器人的灵活性和可靠性。另外,本文在机器系统中引入了无线调试系统,使得机器人在运行过程中的各种信息变的可控可观测,极大地加快 了系统的调试进度。同时,调试系统的PC端程序可以生成机器人的路线代码,使得机器人策略路线的制定更加方便可靠。