智能移动机器人的传统导航方式总存在着误差、精度等问题,在传统导航方式的基础上,本文提出了一种利用改进的红外避障法来解决智能移动机器人的导航问题。它利用转角检测功能进行实时定位来确定智能移动机器人的位置,再利用分层单元分解法的基本原理完成环境信息完全知道的全局路径规划,实现了由简单传感器就能解决复杂环境的导航及遍历问题。
单片机毕设调试指导视频9、继电器调试与外接负载方法
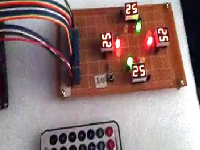
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
单片机毕设调试指导视频7、从protel中粘贴清晰图
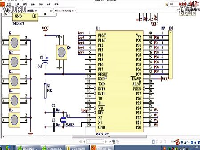
单片机毕设调试指导视频8、芯片引脚说明
单片机毕设调试指导视频10、仿真软件怎么用(入门)
单片机毕设调试指导视频6、按键轻触按键的调试方法
单片机毕设调试指导视频4、数码管电路调试方法
单片机毕设调试指导视频2、LCD1602液晶的调试方法
x