针对移动机器人寻线控制的传统寻线控制系统使机器人在导引线上摇摆前进的问题,引入模糊控制的思想,并在此基础上设计一种新型基于多传感器信息融合的寻线控制系统,并根据反模糊化结果和实验修正给出核心程序,实际运行显示此改进设计很大程度改变机器人寻线中的摇摆现象,实现平稳的寻线控制。此设计思想对各种条件下的移动机器人寻线控制具有一定参考价值。
高科技机器人,变形金刚,神兽金刚曝光!
传感器与信号调理(山东大学)—第27讲
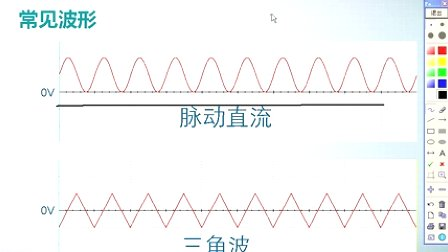
一周搞定系列之模电_第3讲_电容、三极管、场效应管介绍
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
许友志电子电路基础视频教程01_基本概念
教你使用电烙铁进行锡焊(焊锡教程)
一周搞定系列之模电_第1讲_视频介绍及Multisim下载安装
x