智能移动机器人跟踪系统应用研究与设计.pdf
时间:03-26 15:02
查看:1086次
下载:163次
简介:
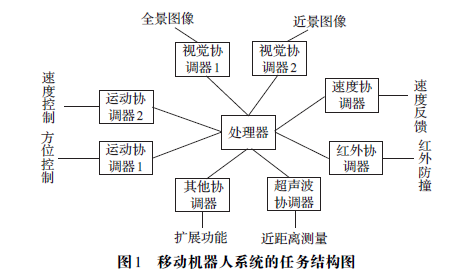
针对移动机器人检测与跟踪系统的世界模型,从智能控制与模式识别方法和传统控制理论相结合的思想出发,提出一种多层次、多阶段的智能控制模型结构。此结构仿人思维模式把复杂任务系统分解为感知、执行、决策三个层次,解决了复杂任务中不易建模的问题;跟踪过程采用Kalman 预报器对运动目标状态进行一步预测估计和两步增量式跟踪算法,可快速平滑地实现移动机器人对运动目标的跟踪驱动控制。给出了该结构模型的移动机器人视觉检测识别和跟踪控制系统在汽车桩考中的实际应用。