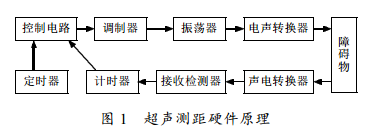
智能移动机器人是机器人研究领域的重要方向, 是当前机器人领域中最活跃的研究主题之一。在分析了智能移动机器人避障常用传感器的基础上, 提出了基于多超声传感器的移动机器人的超声避障系统。介绍了超声避障系统的模糊控制规则和非模糊化, 并给出了实验结果。实验结果表明, 模糊控制机理和策略易于接受和理解, 便于应用开发, 模糊避障算法对环境有很大的适应性, 机器人在不同的环境条件下实现了避障。
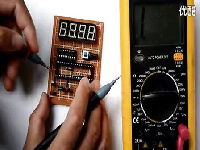
单片机毕设调试指导视频9、继电器调试与外接负载方法
基于FPGA的交通灯设计(非单片机)-红外遥控通行状态
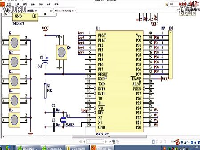
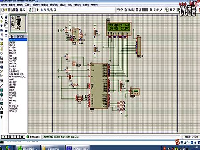
单片机毕设调试指导视频7、从protel中粘贴清晰图
单片机毕设调试指导视频8、芯片引脚说明
单片机毕设调试指导视频10、仿真软件怎么用(入门)
单片机毕设调试指导视频6、按键轻触按键的调试方法
单片机毕设调试指导视频4、数码管电路调试方法
单片机毕设调试指导视频2、LCD1602液晶的调试方法
x