本章将向大家介绍如何使用STM32F4自带的CAN控制器来实现两个开发板之间的CAN通讯,并将结果显示在TFTLCD模板上。
基于STM32F4的四旋翼实时图传系统
基于stm32f4的智能避障小船
小车视频演示实验,基于stm32f4的蓝牙控制小车
基于STM32F4的四轴航拍飞行器
基于stm32f4的智能环境监测系统
STM32F4校园创新大赛-GPRS监控系统
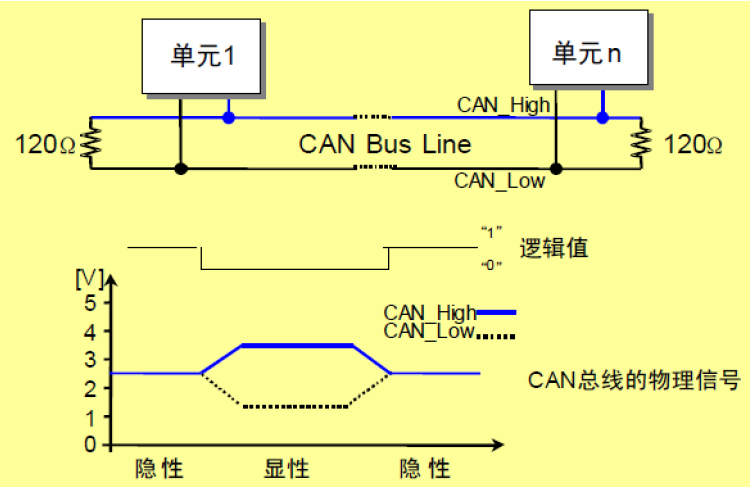
王健带你征服汽车CAN总线—第一讲:CAN总线原理
CAN总线设计/基于51单片机CAN总线通信设计
x