对现代工业对切纸机实时性及高精度的要求,介绍以TMS320F2812为核心、CAN总线通信的伺服电动机跟踪系统。采用基于自适应模糊PID算法控制器对切刀从电机进行伺服控制。测试实验给出了使用传统PID算法和使用自适应模糊PID算法的控制效果比较。结果表明应用模糊PID控制器能够在不同的速度切换情况下对切刀从电机进行有效控制,达到了系统实时性及精度要求。
手把手教你学DSP视频教程之第2节 TMS320F2812的结构、资源及性能
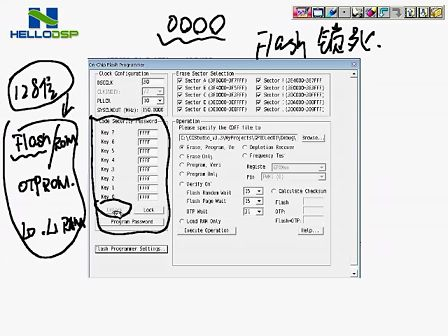
手把手教你学DSP视频教程之第1节 如何开始DSP的学习与开发
手把手教你学DSP视频教程之第20节eCAN模块(4)
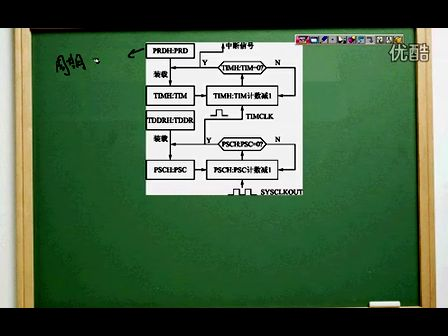
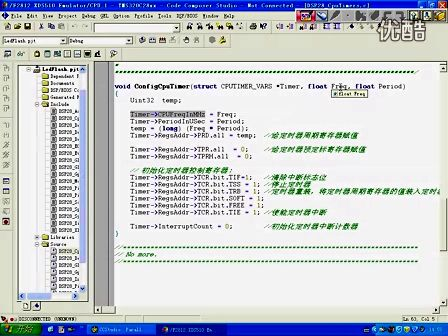
手把手教你学DSP视频教程之第12节CPU定时器
手把手教你学DSP视频教程之第12节CPU定时器2
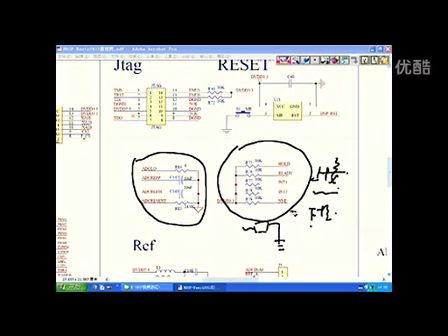
手把手教你学DSP视频教程之第3节 TMS320F2812的硬件设计
手把手教你学DSP视频教程之第20节eCAN模块(2)
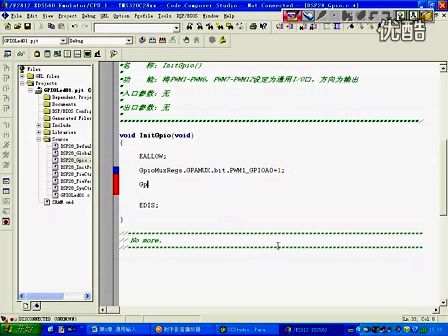
手把手教你学DSP视频教程之第11节 多路复用器GPIO
Cocktail
x