过研究无轴承电机悬浮子系统的数学模型特点,提出了数学模型简化前提下的控制方法,并在PID控制的基础上,给出了使得PID系统稳定需要满足的基本条件;之后建立了在PID控制系统稳定条件之上的模糊自适应PID控制方法。通过MATLAB仿真实验结果分析,证实了该方法对于悬浮系统的实用性和可行性。
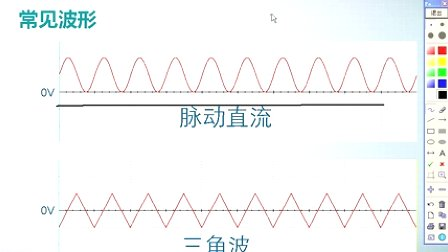
一周搞定系列之模电_第3讲_电容、三极管、场效应管介绍
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
许友志电子电路基础视频教程01_基本概念
教你使用电烙铁进行锡焊(焊锡教程)
一周搞定系列之模电_第1讲_视频介绍及Multisim下载安装
MATLAB教学视频第11章 Simulink仿真
张飞电子工程师培训视频教程
Cocktail
x