由于磁航向测量系统应用领域日趋拓宽,数字磁罗盘的航向精度亟待提高。简要介绍了由磁阻罗盘、角度传感器和单片机组成的数字磁罗经系统的软硬件组成及工作原理。探讨了使用八角度法进行误差补偿的可行性。通过实验验证能准确自动消除自差实现导航数据的精确、实时、高清晰的显示。
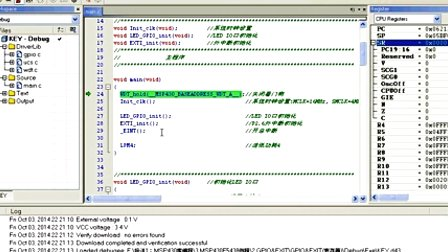
爱晶电子MSP430库函数编程3.GPIO
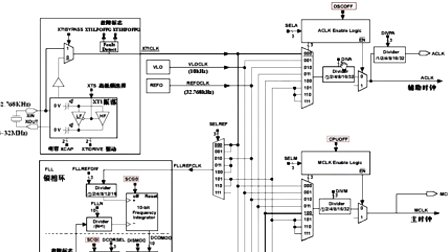
爱晶电子MSP430库函数编程2.时钟系统
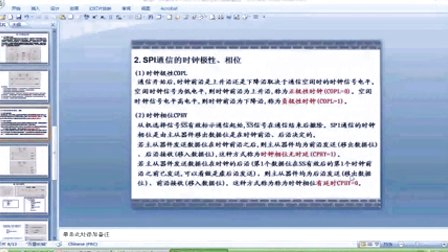
爱晶电子MSP430库函数编程5.2SPI通信
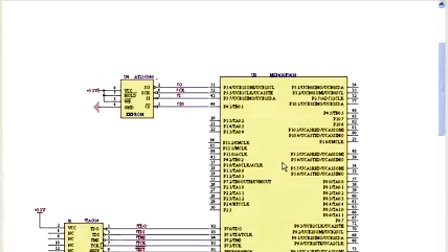
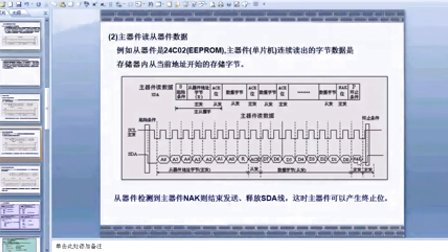
爱晶电子MSP430库函数编程6.1I2C通信与EEPROM_24C02读写
爱晶电子MSP430库函数编程6.2I2C通信
爱晶电子MSP430库函数编程5.1SPI通信与EEPROM_25C040读写
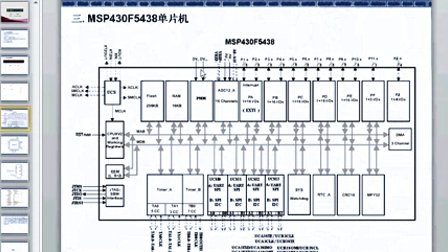
爱晶电子MSP430库函数编程1.单片机MSP430F5438
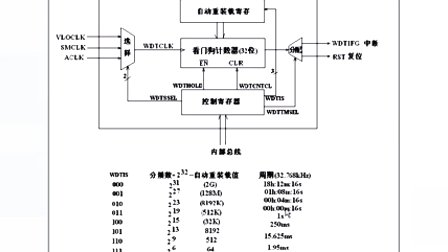
爱晶电子MSP430库函数编程9.看门狗WDT_A
x