智能控制器应具有自整定、自综合和监控三种运行状态。自整定是指控制器根据对象特性变化自动整定PID 参数, 使控制系统具有稳定鲁棒性.自综合用来保证控制系统的性能鲁棒性! 监控状态用来确保控制系统安全可靠运行。
第十讲 FPGA设计常用IP核-锁相环
第10讲:FPGA设计常用IP核-锁相环
《吃豆人》——基于FPGA和51单片机的小游戏设计
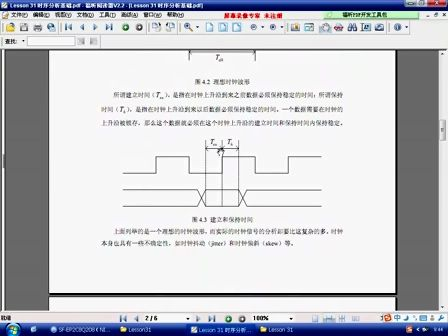
Lesson31:时序分析基础—专辑:《quartus 教学视频》
FPGA/集成电路 笔试面试题09090001
FPGA/集成电路 笔试面试题09090003_0
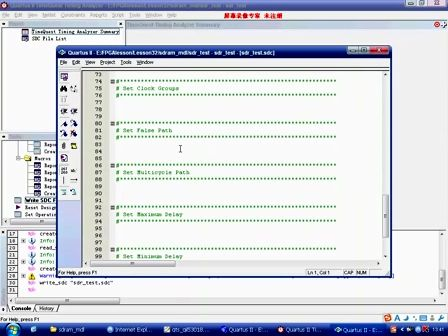
Lesson32:如何使用TimeQuest—专辑:《quartus 教学视频》
第1讲:FPGA系统设计基础--华清远见fpga培训视频教程
x