基于单片机AT89S52设计的自动往返电动小车(论文 电路 程序).pdf
时间:08-05 14:09
查看:13343次
下载:163次
简介:
摘要:
本自动往返电动小车可以实现在一段特定赛道上往返行驶,在特定路段限速通过,并且测量行驶时间和路程的功能。设计以改装的玩具小车为基本车架,以单片机AT89S52为控制中心,利用RPR220光电对管扫描赛道上区分路段的黑线,还通过该种光电对管计算小车车轮转过圈数,由此算出小车驶过路程。另外,系统运用L298N驱动小车的直流电机,并且可以在LCD1602上显示小车往返时间和路程。
设计任务
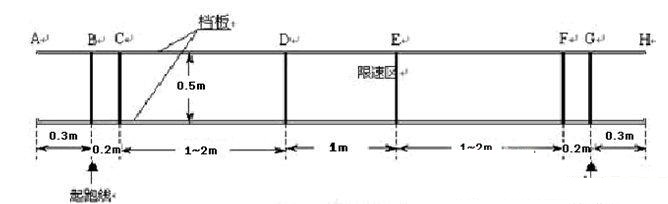
设计并制作一个能自动往返于起跑线与终点线间的小汽车。允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控)。
跑道宽度0.5m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm。在跑道的B、C、D、E、F、G各点处画有2cm宽的黑线,各段的长度如图所示。
基本要求
- 车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10秒,然后自动返回起跑线(允许倒车返回)。往返一次的时间应力求最短(从合上汽车电源开关开始计时)。
- 到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差的测量值)。
- D~E间为限速区,车辆往返均要求以低速通过,通过时间不得少于4秒,但不允许在限速区内停车。
系统总体电路图
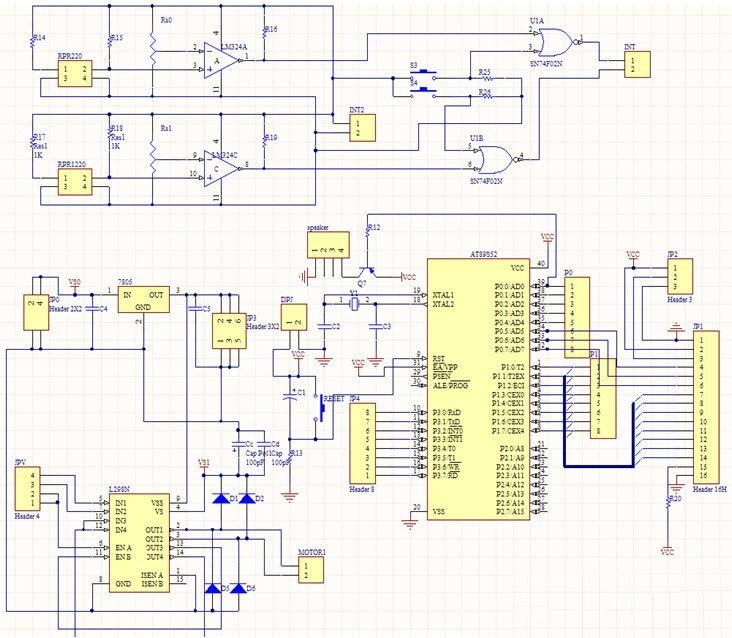
详情见上传文档