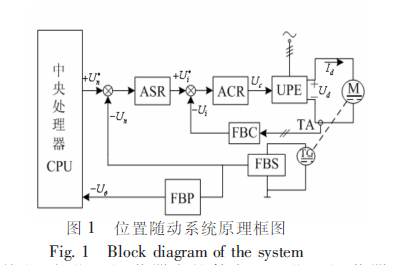
提出了一种采用直流力矩电动机作为执行元件的高精度位置系统实现方案。系统在结构上消除了减速装置,简化了结构,减小了误差以及消除了由此可能带来的自激振荡。整个系统设计采用位置、转速、电流三环结构。电流调节器和转速调节器采用PI调节器,位置调节器采用比例调节器。给出了系统主要环节实现方法,按照工程设计方法确定了各调节器的参数,并在MATLAB环境下对所设计系统进行了仿真。在1°和180°的阶跃给定下,系统超调量和稳态误差均为0;在幅值为5°,频率为1 Hz正弦信号输入下,系统输出能够完全跟随输入。结果表明系统具有高的定位精度和较好的跟随性能,能够满足设计要求。