1 引言
随着信息处理技术的不断发展,尤其是计算机的广泛应用和Internet的迅猛发展,供电系统的可靠性要求越来越高,因此对不间断电源(UPS)技术指标的要求也越来越高。UPS的核心部分是一个恒频恒压逆变器,由于传统模拟控制需要使用大量的分立元器件,老化和温漂严重影响了系统的长期稳定性。基于DSP的数字控制技术能大大改善产品的一致性,同时增加了控制的柔性,提高了整个系统的稳定性和可靠性[1]。
2 系统结构
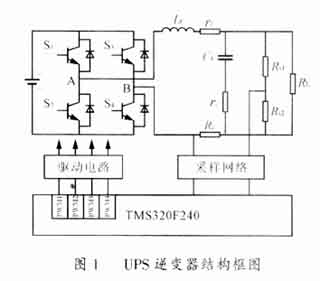
图1是本文提出的数字控制UPS逆变器的结构框图。主电路采用了全桥结构,控制电路是以TI公司的电机控制专用DSP芯片TMS320F240为核心的全数字控制器[2]。Lf和Cf为逆变器的输出滤波电感和滤波电容,rL和rC分别为滤波元件的串联寄生电阻。考虑到控制的精确性和产品的成本,控制系统采用了电阻取样,主功率电路与控制电路共地的系统控制方法。Rs1和Rs2为输出电压取样电阻,Rc为电感电流取样电阻。电压和电流取样信号通过采样网络,输入到DSP的A/D转换口。DSP的PWM模块输出4路PWM信号经过驱动电路之后驱动4个IGBT管。
3 控制系统设计
3.1 数字双环控制器结构
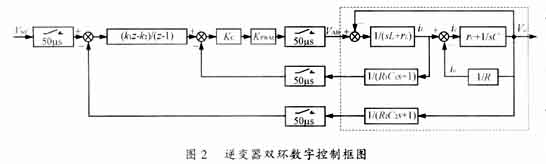
逆变器的控制有许多方案[3],本文的UPS逆变器采用了电感电流模式的数字双环PI控制方法,具体的逆变器数字控制框图如图2所示。图中的虚线框内部分为逆变器的主电路,Vref为存储在DSP程序空间内的正弦波数据表,VAB为逆变桥两桥臂中点间的电压。为了抑制反馈量中的高频噪声,提高采样的精确性,反馈通道中增加了阻容低通滤波器。电压误差信号经过数字PI调节之后的输出作为电流环的指令,电流误差信号再经过比例调节得到电流环输出。电流环输出与定时器产生的三角波比较后得到四路门极脉冲。
3.2 电流环和电压环参数设计
图3为简化的电流内环框图,Zoh为零阶保持环节,它的s域传递函数为 ,其中Ts为采样周期。
,其中Ts为采样周期。
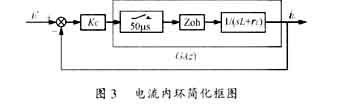
本文设计的电压和电流采样周期均为50μs。电流环的开环脉冲传递函数为:

图4为简化的电压外环控制框图。其中 为电压外环数字PI控制器脉冲传递函数的一般形式,K1-K2=KITs,KI为积分系数。
为电压外环数字PI控制器脉冲传递函数的一般形式,K1-K2=KITs,KI为积分系数。
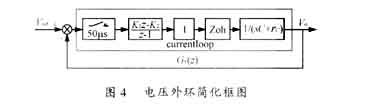
由于上面设计的电流内环的跟踪速度远快于电压外环,在设计电压外环时,作如下合理的简化:设电感电流已经能够跟踪指令电流,这样可以假设电流内环为一个单位比例环节1,从而得到电压外环的开环脉冲传递函数为:
 (忽略了电容的串连电阻rC),其闭环传递函数的特征方程为:
(忽略了电容的串连电阻rC),其闭环传递函数的特征方程为: 。同样根据无差拍控制原理,令特征根为0,得到K1可以为任意常数。根据K1和K2的关系并结合仿真的方法可以确定K1。
。同样根据无差拍控制原理,令特征根为0,得到K1可以为任意常数。根据K1和K2的关系并结合仿真的方法可以确定K1。
在上面的控制参数设计过程中,均采用了单位反馈的简化方框图,实际线路的反馈通道上肯定会有比例环节,因此在上述设计的基础上,还要根据实际的反馈比例变换控制方框图,得到 最终的控制环节参数。
最终的控制环节参数。
3 采样控制时序设计
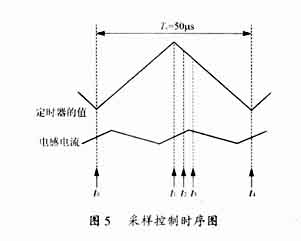
图5是本文提出的一种采样控制时序示意图。t0-t4为一个开关周期,由于采用了倍频单极性的正弦波脉宽调制方法,输出滤波电感的脉动频率是开关频率的两倍,这样可以缩小滤波元件的体积。在定时器周期中断的t1时刻,同时启动两路A/D转换器,进行电压和电流反馈量的采样,t2时刻A/D转换结束,立即进行双环控制算法的执行直至t3时刻。在定时器下溢中断的t4时刻,将计算所得的比较值CMPRx载入。显然,在这种采样控制方法中,控制点相对于采样点只延时了半个开关周期,比许多文献[4][5]报道的延时一个开关周期的采样控制方法,控制的实时性得到的很大的提高,仿真和实验都验证了这一点。
4 仿真和实验结果
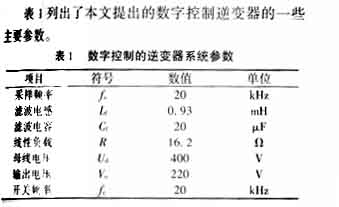
表1列出了本文提出的数字控制逆变器的一些主要参数。
在进行实际的实验之前,先用MATLAB的SIMULINK工具箱对UPS逆变器系统进行了仿真研究,图6为负载切换时的输出电压和负载电流的仿真波形。
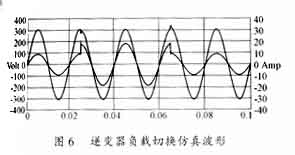
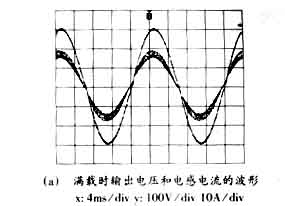
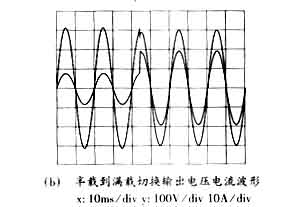
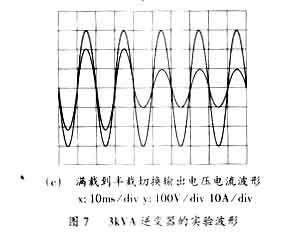
图7(a)为满载3kVA下输出电压和电感电流的稳态实验波形,用LEM公司的钳形表HEMEANALYST2060测得:THD=1.4%,实验数据表明控制系统具有很好的稳态特性。图7(b)为半载到满载切换时的负载电压和负载电流实验波形,图7(c)为满载到半载的切换。实验波形与仿真波形吻合得比较好,显示逆变器能够很快将输出电压调整至稳态,表明了控制系统具有良好的动态特性。
5 结语
相对于模拟控制技术,基于DSP的全数字控制技术大大简化了控制电路的设计,增加了控制的灵活性。同时采用了数字无差拍控制技术和延时半个开关周期的采样控制方法,逆变器的动态特性大大改善。仿真和实验均验证了这种基于DSP的全数字控制方案的先进性和实用性。