摘要:本系统拟计划采用DSP控制步进电机推动轻装置移动实现测量装置的精准定位。系统拟采用的主控制器为DSP28335,被控对象为最小步进角为1.8°的42步进电机,采用DSP输出PWM脉冲波通过电机驱动器摔制电机的运行。系统根据具体控制要求改变对PWM参数的设置,并通过相关的算法对过程参数进行修正以完成系统目的。电机控制系统的控制精度为线位移10 μm,能够达到为实验室项目进行支持的目的,本系统亦可广泛应用于电机控制领域。
0 引言
步进电机是将电脉冲信号转变为角位移或线位移的开环控制器件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,它的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。为实现对步进电机的控制,一般可采用单片机为控制器,通过一些大规模集成电路来控制其脉冲输出频率和脉冲输出数以实现步进电机的控制,然而整个系统的准确性、可靠性都存在缺陷。本系统是为实验室某项目服务的子系统,系统的研究目的在于精确、快速、稳定地调节实验装置的相对移动,找到最佳位置、角度安放装置,故本系统拟采用浮点型DSP28335作为系统控制器,拟采用其集成的PWM输出模块,减少外围电路的使用,提高了系统的可靠性和系统的控制精度。
1 系统总体方案设计
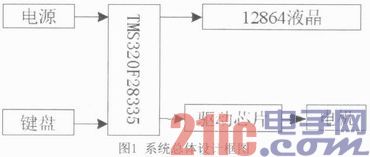
本系统总体设计框图如图1所示。拟采用数字信号处理芯片DSP28335根据控制算法输出一个特定的PWM脉冲序列,该脉冲序列经由特定的步进电机驱动器实现对高精度的42步进电机的控制,通过控制算法自动或者手动调节电机的运行状态和运行速度并送液晶实时显示。通过对系统点位的检测来判定是否达到系统的控制目的,最终通过一定算法完成系统安装位置的选定。
2 系统硬件实现
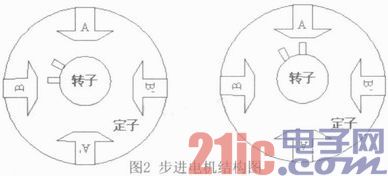
本系统拟选用的主控制器为TMS320F28335,其具有150MHz的高速处理能力,12位16通道ADC,具备32位浮点处理单元,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM)。本系统中正是使用了其独立的PWM模块产生脉冲信号。因课题需要精确定位故选用控制精度为1.8°的42步进电机实现装置推动,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件,其结构图如图2所示。
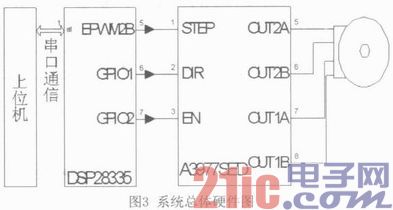
从理论上讲,步进电机的驱动方式只需通过循环改变定子线圈励磁就能实现,但是由于电机对电路驱动能力要求高,故本系统采用外接驱动芯片A3977,A3977细分驱动器采用高性能的专用微步距电脑控制芯片,其含内置转换器的完整的微步电动机驱动器。只需在一个步进输入一个脉冲即可驱动电动机进行一个步进,通过两个逻辑输入确定所处的全、半、1/4或1/8步进模式。其内部同步整流控制电路用来改善脉宽调制(PWM)操作时的功率消耗,并且该芯片可以自动地控制其PWM操作工作在快、慢及混合衰减模式。本驱动芯片设置为全步模式,其采用共阴接法en使能,dir控制方向,step信号接收脉冲信号,信号的频率决定转速,脉冲的个数控制电机的步进距离。系统的总体硬件图如图3所示,上位机对信号采集后通信DSP,使DSP产生相应的控制信号输给连接好42电机的步进电机驱动器A3977SED,控制电机的运行完成系统控制目的。
3 系统软件设计
本系统的软件设计拟从两方面展开:1 PWM脉冲的产生设计,2步进电机的控制方式设计。
3.1 PWM脉冲序列的产生
PWM是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。本系统采用DSP产生脉冲序列,DSP28335共12路16位的ePWM,能进行频率和占空比控制。PWM信号频率由时基周期寄存器TBPDR和时基计数器的计数模式决定。初始化程序采用的计数模式为递增计数模式。在递增计数模式下,时基计数器从零开始增加,直到达到周期寄存器值(TBPDR),然后时基计数器复位到零,再次开始增加。
PWM信号周期与频率的计算如下:
ePWM的时钟
TBCLK=SYSCLKOUT/(HSPCLKDIV×
CLKDIV): (1)
Tpwm=(TBPRD+1)*Ttbclk: (2)
Fpwm=1/(Tpwm) (3)
其初设置程序流程图如图4所示。

3.2 步进电机的控制
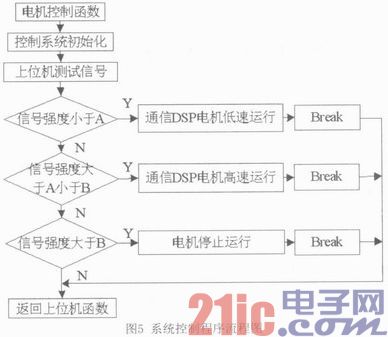
本系统设计了手动和自动两种控制方式,手动模式主要运用于对自动化和控制要求不高的场合,通过按键实现电机的步移、加减速、正反转和启停。自动模式运用于对自动化程度、控制精度要求高的工况。针对实验室项目,本系统采用的控制方式主要为自动模式。上位机上电后即开始检测实验室装置(流量传感器)输出信号,通过与事先设定好的两个阈值A和B(B>A)进行比较,当信号强度为零时电机推动传感器高速循环扫描现场直到信号强度大于阈值A时,系统判断为粗调成功。此后系统进入微调阶段,电机进入低速运行模式,传感器低速移动直到信号强度大于或者等于B强度时系统控制电机停止运行。系统的控制流程图如图5所示。在本系统中针对不同的工况设计的两个信号阈值为程序设计中的周期寄存器提供了设置依据,因实验室系统对精度要求较高,故周期寄存器设置的初值都较大从而使Fpwm的值较小,电机的转速也相应较低。在本系统中选用EPWM2B端口输出PWM的脉冲,GPIO1控制电机转动方向,GPIO2控制电机的启停。
4 系统调试分析
4.1 PWM脉冲调制分析
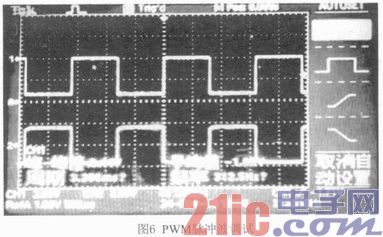
图6为DSP输出的脉冲波形和其相对应的参数,通过修改参数值可以实现对脉冲频率的改变,并且可以通过DSP的点对输出控制电机的运行。通过调试分析能够很好地实现实验目的,持续地改变电机的运行状态。
4.2 控制精度调试
本系统采用电机推动丝杆移动装置。丝杆采用的是滚珠丝杠,其为一种将回转运动转化为直线运动的理想的产品。
本系统选用的电机的最小步进角为1.8°故控制精度调试实际就是丝杆精度的调试,本系统选用的丝杆的额定扭矩为4N.m,最小角位移对应线位移为10 μm。
系统总体调试:
现阶段系统调试结果为通过按键和程序控制能够很容易地实现电机的运行,能够通过计算得出电机的运行角速度并送液晶屏显示当前过程量。连接好丝杆的电机能够实现对传感器的推动。通过上位机对传感器信号强度的实时监测,系统能够基本满足设计目的,即系统能自动并有效地进行最佳信号点的检测,达到对物块的精确定位。
5 小结
本系统从实际工程背景出发,旨在为实验室某项目提供技术支持。通过对系统的设计和调试能够从理论上实现项目目的,达到控制要求。通过硬件选型、软件设计、控制方案研究和实际调试分析,系统能够达到预期设计目的。然而本系统还存在一些问题有待解决,因本系统是配合项目其他模块而设计的,而其他模块尚在调试阶段,测试数据不精确,故电机系统控制方案设计模块还有待提高,将在后续项目进程中进一步研究。本系统当前研究成果能够适用于对控制精度要求不高的场合,因系统的控制方法比较简单、系统结构简洁,有一定的应用价值。
![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)


























