家里废弃的自行车的另类情调!电子发烧友们的遥控梦在本文的自行车上发挥得淋漓尽致,点击了解遥控DIY详情!如果你厌倦了用键盘、鼠标、游戏方向盘、手柄来玩极品飞车,不妨试下用自行车,寓健身、娱乐、减肥于一体,那是相当拉轰!
制作时间:5小时;制作难度:★★☆☆☆;GEEK指数:★★★☆☆。
1 引言
近来有点喜欢玩《极品飞车》,所以买了一个游戏方向盘。
快递到后,迫不及待地拆开,才玩了一会,就想把它扔掉,手感实在有点烂,微微地打方向一点反应都没有,再打多点突然间像打鸡血一样猛转方向,还不如键盘来得爽。扔垃圾筒有点可惜,想了想,觉得可以花点心思改造一下,打造一个不错的游戏控制器。

家里能与“速度与激情”扯上点关系的,就只有1楼已经废弃了10年的简易跑步机,和一台邻居送的很破的自行车。
我选择了自行车,个人觉得把自行车的后轮架起来,操控起来实在很自然。另外还有一个原因,我搬不动跑步机。
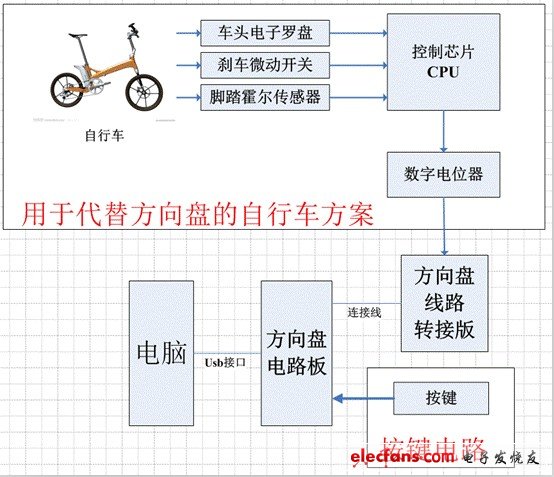
基本设计如下:
自行车车头 ————》 赛车方向盘
自行车脚踏 ————》 赛车油门
自行车左刹车 ————》 赛车脚刹
自行车右刹车 ————》 赛车手刹或氮气加速
2 设计思路
一般游戏方向盘都在方向盘和油门刹车上装有线性电位器,当玩家打方向盘或踩下油门刹车的时候,电位器的阻值改变,通过AD转换测量加到电阻器的变化电压,从而得知方向盘或油门刹车的改变量,再通过MCU或usb芯片与电脑通讯。
由于我不太懂usb通讯方面的知识,所以就直接采用“拿来主义”,取得方向盘的主电路板来制作。
简单来说,只要输入一个相应电阻给方向盘的主电路板,便可以“骗”它进行工作,发送相应数据给上位机(电脑《极品飞车》),而我们要做的工作,就是使用一些传感器,来测量自行车的一些参数(速度,车头转向,是否刹车),通过MCU处理后,改变数字电位器,接入到方向盘的主电路板中,便可。
请看详细图示:
3 工具
自行车一台,自行车骑行台一只。
霍尔传感器模块,微动开关,LPC2013最小系统模块,电子罗盘模块,加速度传感器模块
ULINK调试器、电脑一台,MDK keil4开发环境,万用表
玩电子的必备工具:电烙铁,锡线,吸锡器,螺丝笔一套,镊子,防水胶布,台钻,扎带等等,反正焊接电路板该有的都要有,不细细述说了。
4 方向盘拆解
把方向盘拆开,测量一些参数:
方向盘线性电位器的最大阻值,左右方向方向盘均打尽的阻值,方向盘居中的阻值。
未踩下刹车时的阻值,踩尽刹车时的阻值。
未踩下油门时的阻值,踩尽油门时的阻值。

经过测量发现,刹车和油门共用一个线性电位器。
而对于方向盘来说,方向盘居中时,其电位器阻值刚好是最大阻值一半,如此一来,就没有必要过多关注其电阻值了。
虽然如此,选用的电位器相差不要超过一个数量级为好。
5 电路设计与焊接
1)由于买回来的ARM7 2103模块已经是最小系统,所有管脚直接引出,因此只需要将其管脚用板略为引伸,接上座子,方便安装便可。整个MCU模块所用到的管脚有——SPI0管脚,I2C0管脚,外部中断2个,一些GPIO口接指示LED、触动开关(可有可无),UART0管脚(调试输出数据用,可有可无)等。
电路图就不需要给出了,如果你以上基本都能看懂或是学过ARM的,那肯定知道怎么接,我只是画了个草图,就开始焊接了,焊好的板子如下。


2)把方向盘的主电路板和转接板取出来,焊到一块万用板上,焊上接线座,方便安装。

为了方便安装,我另外还给两个霍尔传感器和加速度传感器、电子罗盘加焊了几块电路板,加上接线座子。全家福一张。

事实上,我另外还买了一个模块,上面集成了一个加速度传感器和一个角速度传感器,本来是怕一个加速度传感器有误差,可以进行取平均值来校正,后没有使用。
美中不足的是,因为使用了电子罗盘,所以每次开始玩的时候,都需要校正,因为自行车的位置不同导致了车头居中朝向不一致,因此需要初始化。甚至在玩的时候,玩得太嗨,动作太大,导致自行车位移,也要不断地校正。
最好的方式,还是在车头上安装一个转动电位器来取代电子罗盘,但是考虑到电位器的安装需要合适的齿轮,安装起来很麻烦,也没有模具,所以就罢了。

3)微动开关(刹车,氮气加速)

在自行车刹车装上两个微动开关,开始的方案是压力传感器,如此一来,刹车的参数便是模拟量,但安装的问题太过于麻烦,所以就采取了开关量的方式来进行。
微动开关直接接入了方向盘的电路板中,不通过ARM7 LPC2103电路板。
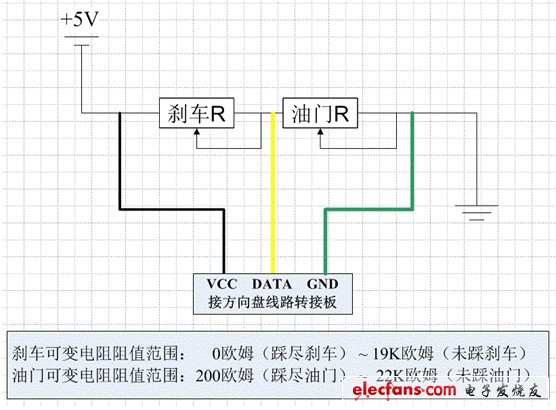
4)数字电位器MCP42050。
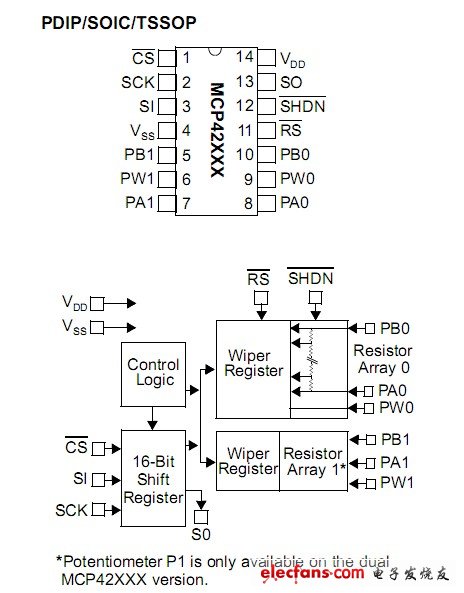
最大量程50K欧姆,SPI通讯接口,2个电位器,精度为50K欧/256,已经是非常够用。在初始设定中,油门深浅(即车速)分10个等级,方向盘每5度设为一个等级,左右各90度便是32个等级。绰绰有余。
5)LPC2103模块。
没什么好说的,处理数据用。

7 编程、调试
1)我使用了小型操作系统Ucos,分成4个任务。
任务1:指示灯亮灭。任务2:电子罗盘数据读取,加速度传感器数据读取,进行数据处理得到转角并写入一全局变量中。任务3:霍尔传感器的数据处理,将时间间隔(车速)写入一全局变量中。任务4:根据速度和转向2个全局变量的数据,把对应的电阻值写入数字电位器中。

6 模块详细介绍
1)霍尔传感器(测量自行车的速度)
霍尔传感器模块是这样工作的,3个管脚,VCC脚,GND脚,DATA脚,缺省状态DATA脚输出低电平,若有磁石靠近,产生磁场切割,便会输出一个高电平,当磁石远离传感器,又恢复低电平。
所以在自行车的脚踏边上贴上一个磁石,把两个霍尔传感器模块装到脚踏经过的两边位置,在踩自行车时,通过计算两只霍尔传感器的时间差,来获得骑车人踩单车的速度,由此对应赛车油门的深浅。

2)电子罗盘,加速度传感器模块(测量自行车的转角)

我使用的这款电子罗盘的芯片型号为HMC5883L,I2C接口,75HZ的数据读取频率,没太多好说的,上电复位,通过I2C接口设置好工作参数和工作模式,就可以读取数据了。数据的模式是地磁在XYZ轴的分量,还搞得不是非常懂。XYZ轴的基准与芯片的位置有关。不过取出数据按照芯片手册计算,就可以测得与地磁的夹角。
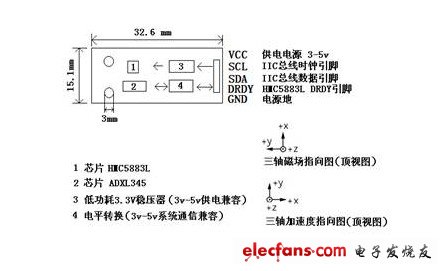
模块上还有一个ADXL345加速度传感器,一样是I2C接口,主要是因为自行车的车头旋转平面并不是完全水平的,因为自行车的车头轴(不知道是不是这样称呼)与地平面有一个夹角,所以就导致了——整个模块无法工作在水平面中,也就是说电子罗盘的XY轴形成的平面,不与水平面平行,Z轴的地磁分量肯定不为0,至少大部分时间不为0。
说了这么多ADXL345加速度传感器就是用来测量水平倾角,对电子罗盘的数据进行校正的。