飞思卡尔 MC9S08AC60
简介
MC9S08AC60系列MCU是低成本、高性能HCS08系列8位微处理器单元 (MCU)的成员。这个系列的单片机均由一对引脚兼容的8位和32位器件组成,是Flexis系列器件的第3个系列产品。Flexis系列控制器是飞思卡尔控制器联合体的连接点,使8位与32位兼容性成为现实。
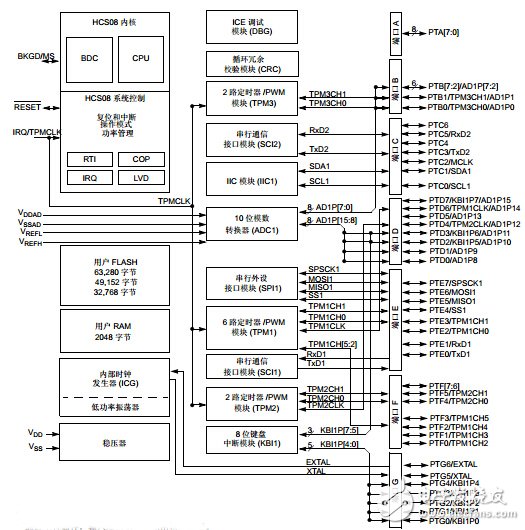
模块结构图
系统时钟图

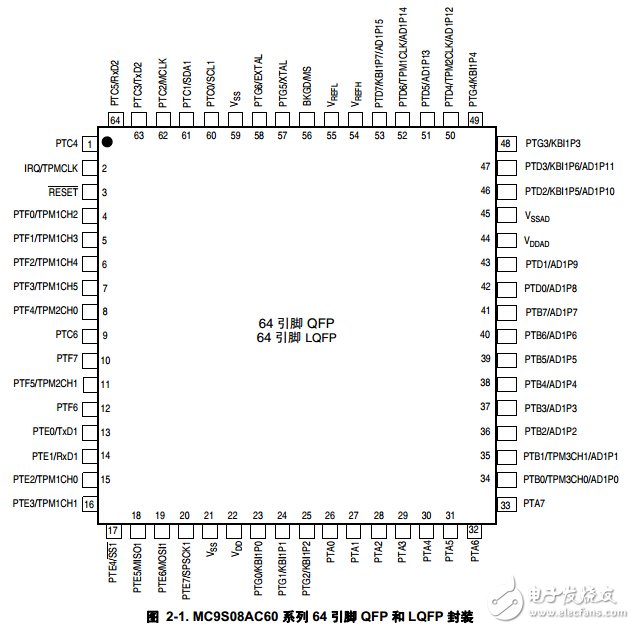
引脚图
通用引脚连接

重要引脚说明
电源(VDD, VSS, VDDAD, VSSAD)
VDD 和VSS 是MCU的主电源引脚。该电压源为所有I/O 缓冲电路以及内部稳压器供电。内部稳压器向CPU 和MCU的其它内部电路提供稳压后的低电压源。
VDDAD 和VSSAD 是MCU的模拟电源引脚。该电源为ADC 模块供电。必须在离该模拟电源引脚尽可能近的地方连接一个0.1 μF 陶瓷旁路电容,来抑制高频噪音。
振荡器(XTAL, EXTAL)
复位后,MCU使用内部生成的时钟(自时钟模式— fSelf_reset),相当于8 MHz 晶体振荡频率。这个频率的时钟源在复位启动时使用,可以作为停止恢复的时钟源,这样可以避免较长的晶体启动延迟。该MCU还包含一个可修整的内部时钟发生器(ICG) 模块,可以用它来运行MCU。
RESET 引脚
RESET 是一个专用的引脚,内置一个上拉器件。它有输入滞后,包含一个高电流输出驱动,无输出斜率控制。内部加电复位和低压复压电路一般都不需要外部复位电路。 这个引脚通常连接到标准的6引脚后台调试连接器,这样开发系统可以直接复位MCU系统。
后台/模式选择(BKGD/MS)
在复位时,BKGD/MS 引脚充当模式选择引脚。复位完成后,该引脚立即作为后台引脚,可以用于后台调试通信。当作为后台/模式模式选择引脚时, 该引脚包括一个内部上拉器件,有输入滞后,且无输出斜率控制。当引脚作为后台引脚时,它包括一个高电流输出驱动。当该引脚作为模式选择引脚时,它只有输入,因此不包含标准的输出驱动。
ADC 参考引脚(VREFH, VREFL)
VREFH和VREFL 引脚分别为ADC模块的电压参考高输入和电压参考低输入。
外部中断引脚 (IRQ)
IRQ 引脚是IRQ中断的输入源,也是BIH 和BIL指令的输入。如果未使能IR功能,这个引脚仍配置为TPMCLK 。
通用I/O和外设端口
剩余的引脚被通用I/O和片上外设功能,如定时器和串行I/O系统共用。复位后,所有这些引脚立即配置为高阻抗通用输入,且内部上拉器件关闭。
重要模块分析
存储器
MC9S08AC60系列MCU中的片上存储器包括RAM、非易失性数据存储的Flash存储器、I/O 和控制/ 状态寄存器。这些寄存器可分为以下三类:
• 直接页面寄存器
• 高位页面寄存器
• 非易失性寄存器
复位、中断和系统配置
复位和中断特性包括:
• 多源复位,实现灵活的系统配置和可靠操作
• 加电检测(POR)
• 低压检测(LVD),使能
• 外部RESET 引脚
• COP 看门狗使能,及两个超时选择
• 非法操作代码
• 来自后台调试主机的串行命令
• 复位状态寄存器(SRS) ,指示最新复位的源
• 每个模块的单独中断向量 (减少轮询开销)
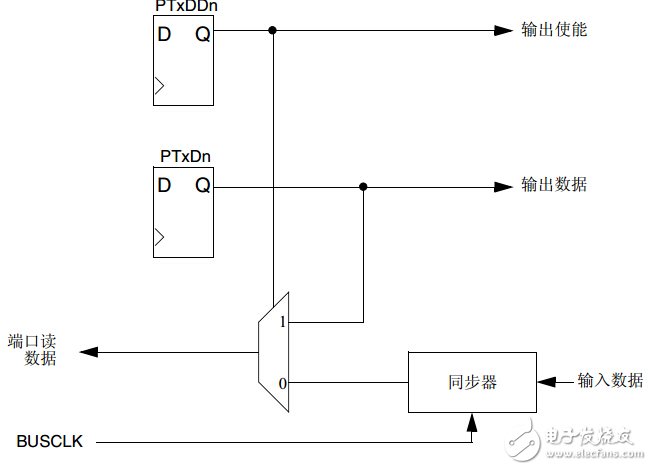
并行输入 / 输出
通过端口数据寄存器读/ 写并行I/O。输入输出方向由端口数据方向寄存器控制。下面的结构图举例了一个引脚的并行I/O端口功能。
中央处理单元 (S08CPUV2)
HCS08 CPU具有以下特性:
• 目标代码完全兼容M68HC05和M68HC08家族
• 所有寄存器和存储器映射到一个独立的64 KB的地址空间
• 16位堆栈指针 (64 K字节地址空间内任意大小、任意地址的堆栈)
• 16位变址寄存器 (H:X)支持强大的索引地址模式
• 8位累加器 (A)
• 许多指令把X作为第二个通用8位寄存器
• 7种寻址模式:
• 固有寻址模式 — 操作数存于内部寄存器
• 相对寻址模式 —8位有符号偏移量的分支地址
• 立即寻址模式 — 操作数位于下一个目标代码
• 直接寻址模式 — 操作数位于0x0000到0x00FF之间
• 扩展寻址模式 — 操作数位于64K字节地址空间内
• H:X相对变址寻址模式 — 提供包括自动增量在内的5种子模式
• SP相对变址寻址模式 — 大大提高C语言编译的效率
• 提供四种寻址模式组合的寄存器-寄存器数据转移指令
• 溢出、半进位、负、零和进位状况码支持根据带符号、无符号、BCD码操作的结果进行条件转移
• 高效率的位操作指令
• 快速8位乘8位和16位除8位指令
• STOP和WAIT指令调用低功耗运行模式
模数转换器(S08ADC10V1)
10位模数转换器 (ADC)是新一代的逼近模数转换器,在集成的微处理器片上系统中运行。 这种ADC模块设计支持最高28个独立的模拟输入 (AD0-AD27)。MC9S08AC60系列微处理器上只使用了其中18个(AD0-AD15、AD26和AD27)输入。这些输入通过ADCH位选择。
ADC模块特点包括:
• 线性逐次逼近算法,10位精度。
• 多达28个模拟输入。
• 8位或10位右对齐格式输出
• 单个或连续的转换 (单个转换后自动返回到空闲)
• 设置采样时间和转换速度 (功率)
• 转换完成标志和中断
• 输入时钟可以选择高达四个时钟源
• 在等待或stop3模式中操作为低噪音操作
• 异步时钟源的低噪音操作
• 可选的异步硬件转换触发
• 自动比较小于,大于或等于编程值
• 温度传感器
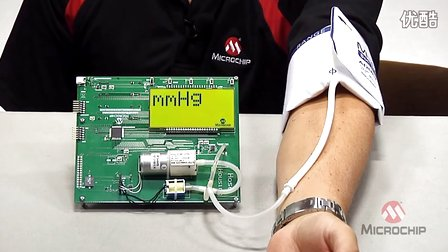
时钟显示程序
使用MC9S08AC的Timer做一个时钟,并在LCD1602上显示
lcd1602.h
#ifndef _NICROSYSTEM_FREESCALE_S08_DEVKIT_LCD1602_H_
#define _NICROSYSTEM_FREESCALE_S08_DEVKIT_LCD1602_H_
unsigned char lcd_status(void);
void lcd_init(void);
void lcd_write_char(unsigned char x,unsigned char y, unsigned char ch);
void lcd_write_str(unsigned char x,unsigned char y,unsigned char *s);
void lcd_write_data(unsigned char data);
void lcd_write_cmd(unsigned char cmd);
#endif
lcd1602.c
#include "lcd1602.h"
#include "derivative.h"
#define LCD_DATA PTED
#define LCD_DATA_DIR PTEDD
#define LCD_DATA_DS PTEDS
#define LCDRS PTAD_PTAD0
#define LCDRW PTAD_PTAD1
#define LCDE PTBD_PTBD0
#define LCDRS_DIR PTADD_PTADD0
#define LCDRW_DIR PTADD_PTADD1
#define LCDE_DIR PTBDD_PTBDD0
#define LCDE_DS PTBDS_PTBDS0
#define LCDRS_DS PTADS_PTADS0
#define LCDRW_DS PTADS_PTADS1
void lcd_clear(void);
void lcd_write_cmd(unsigned char cmd);
void init_lcd() {
LCD_DATA_DIR=0xff;
LCDRS_DIR=1;
LCDRW_DIR=1;
LCDE_DIR=1;
LCDRS_DS=1;
LCDRW_DS=1;
LCDE_DS=1;
LCD_DATA_DS=0xff;
LCD_DATA=0;
LCDE=1;
asm("nop");
asm("nop");
asm("nop");
asm("nop");
asm("nop");
asm("nop");
lcd_clear();
lcd_write_cmd(0x38);//设置lcd功能:8位总线,双行显示,5X7点阵字符
lcd_write_cmd(0x0f);//显示开关控制:显示ON,光标ON,闪烁ON
lcd_write_cmd(0x06);//光标输入方式增量移位
lcd_write_cmd(0x80);
}
unsigned char lcd_status() {
byte lcdstatus;
LCD_DATA_DIR=0x00;
LCDRS=0;
LCDRW=1;
LCDE=0;
asm("nop");
asm("nop");
asm("nop");
asm("nop");
LCDE=1;
lcdstatus=LCD_DATA;
LCD_DATA_DIR=0xff;
return lcdstatus;
}
void lcd_write_cmd(unsigned char cmd) {
byte status;
LCD_DATA=cmd;
LCDRS=0;
LCDRW=0;
LCDE=0;
asm("nop");
asm("nop");
asm("nop");
asm("nop");
do{
status=lcd_status();
}
while(status&0x80);
LCDE=1;
}
void lcd_clear(void) {
lcd_write_cmd(0x01);
}
void lcd_write_data(unsigned char data) {
byte status;
LCD_DATA=data;
LCDRS=1;
LCDRW=0;
LCDE=0;
asm("nop");
asm("nop");
asm("nop");
asm("nop");
do{
status=lcd_status();
}
while(status&0x80);
LCDE=1;
}
void lcd_write_char(unsigned char x,unsigned char y,unsigned char ch) {
if(y)
lcd_write_cmd(0xc0+x);
else
lcd_write_cmd(0x80+x);
lcd_write_data(ch);
}
void lcd_write_str(unsigned char x,unsigned char y,char*s) {
if(y)
lcd_write_cmd(0xc0+x);
else
lcd_write_cmd(0x80+x);
while(*s){
lcd_write_data(*s);
s++;
}
}
main.c
#include /* for EnableInterrupts macro */
#include "derivative.h" /* include peripheral declarations */
#include "mc9s08ac16.h"
#include "lcd1602.h"
const unsigned char table[10]={‘0’,‘1’,‘2’,‘3’,‘4’,‘5’,‘6’,‘7’,‘8’,‘9’};
unsigned char hour=11,minute=20,second=0;
unsigned char con_result[9];
void init_system_clk(void)
{
ICGC1=0xf8;
ICGC2=0x89;
while(ICGS1_LOCK==0);
}
void convert() /*covert numeric data to char data,for instance,1 to ‘1’ */
{
unsigned char tens,unit;
tens=second/10;
unit=second%10;
con_result[7]=table[unit];
con_result[6]=table[tens];
tens=minute/10;
unit=minute%10;
con_result[4]=table[unit];
con_result[3]=table[tens];
tens=hour/10;
unit=hour%10;
con_result[1]=table[unit];
con_result[0]=table[tens];
con_result[8]=‘\0’;
con_result[2]=‘:’;
con_result[5]=‘:’;
}
interrupt VectorNumber_Vtpm1ovf void TMP1_OVF_ISR(void)
{
DisableInterrupts;
TPM1SC_TOF=0;
second++;
if(second>59)
{
minute++;
second=0;
}
if(minute>59)
{
hour++;
minute=0;
}
if(hour>23)
{
hour=0;
}
convert();
lcd_write_str(4,1,con_result);
lcd_write_cmd(0x0c);
EnableInterrupts;
}
void main(void)
{
EnableInterrupts; /* enable interrupts */
/* include your code here */
SOPT_COPE=0;
init_system_clk();
init_lcd();
lcd_write_str(2,0,"NicroSystem");
TPM1SC=0x4e;
TPM1MODH=0xf4;
TPM1MODL=0x24;
for(;;) {
//__RESET_WATCHDOG(); /* feeds the dog */
} /* loop forever */
/* please make sure that you never leave main */
}
典型应用
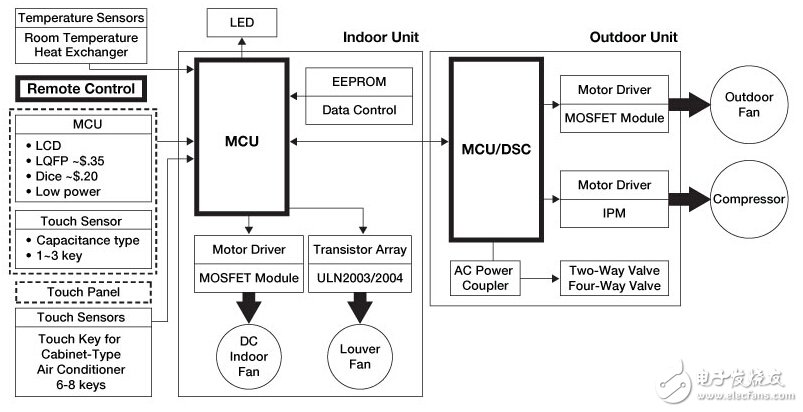
室内空调系统
现代空调系统使用越来越多的半导体来支持一系列高级功能,包括节能电机、交互式用户界面和遥控器等。飞思卡尔可提供满足这些领域特定需求的相应解决方案, 例如,能够提高能效并降低工作噪声的高级电机控制解决方案,针对用户界面的一系列控制解决方案,以及针对遥控的基于红外线和射频的解决方案。
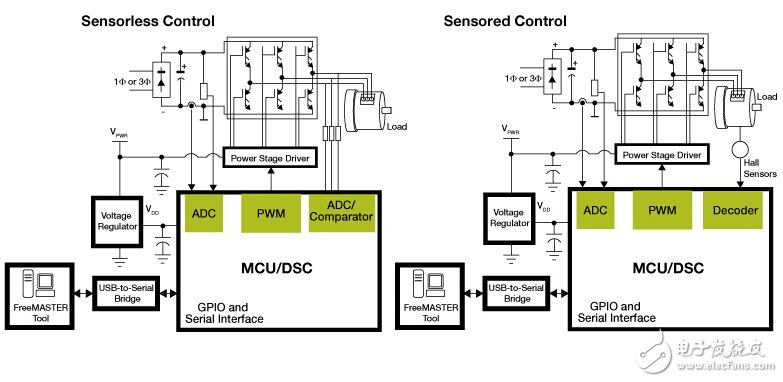
无刷直流电机(BLDC)
无刷直流(BLDC)电机在风扇、泵、HVAC风机与压缩机、计算机磁盘驱动器与外设、家用电器、机器人、伺服系统、牵引控制、缝纫机和跑步机等应用中广 泛使用。BLDC电机是一种旋转电动机械,其定子为类似感应电机的传统三相定子,转子使用永磁体。电机扭矩和速度可由微控制器(MCU)或数字信号控制器 (DSC)实现极高效控制。飞思卡尔支持霍尔传感器(换向)和无传感器控制功能。
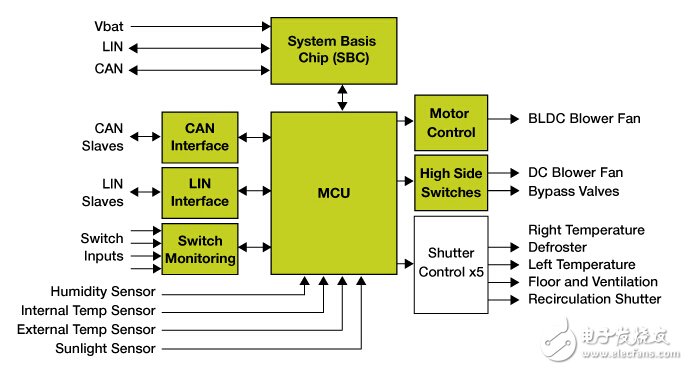
汽车暖通空调(HVAC)
暖通空调(HVAC)系统利用各种传感器输入的数据,控制不同类型的电机,如用于摆叶的步进电机和直流/无刷直流风扇电机。