引言
在各型雷达导引头的研制开发中,经常需要多次试验以检验雷达对目标回波信号的分析处理性能。然而一般外场试验虽然是最真实的实战模拟,但需要耗费大量的人力物力,试验成本昂贵,不适于研制阶段的性能考核,通常只作为导弹整体研制完成后的最终性能考核验证。因此,能够在实验室为雷达导引头工作提供一个模拟真实工作状态的电磁环境就显得格外重要。雷达回波模拟器正是为适应上述需求研制出现的,它不仅为设计者节省大量的研制费用,而且可以缩短研制周期,提高工作效率。
从实现方法上,雷达回波模拟器一般分为两大类:存储回放式和自主产生式。存储回放式是基于接收待测雷达产品的频率合成器的发射信号调制脉冲,并对发射信号进行下变频、采样存储、完成目标与干扰的信息数字调制处理,再通过高速D/A和上变频器回放出来的一种实现模式。自主产生式则无需接收待测产品的发射信号,但需要得到与产品相参的时钟和调制脉冲、相参帧同步信号,在此基础上,采用一个与产品相近的频综,直接根据目标和干扰的参数信息产生产品所需的模拟回波信号。
两种方式都有各自的优缺点。存储回放式对波形参数中如带宽、脉宽等的变化不敏感,可自动适应;但对于脉间频率捷变情况下的测频处理则很难快速高精度实现,且由于高速A/D的限制,模拟回波信号的信噪比很难做高。自主产生式则规避了存储回放式的上述缺点,但对如带宽、脉宽等波形的变化必须依靠产品提供信息,灵活性有所欠缺。
本文论述一种自主产生式的雷达回波模拟器中频部分的设计实现方法,该模拟器可产生脉冲单频、脉冲线性调频、步进频、步进频+线性调频等多种波形的雷达回波信号,并可产生双目标和参数可控的带限高斯白噪声,可模拟主要的干扰类型;输出信号既可以直接用于信号处理机的中频注入式测试,也可上变频后用于雷达系统的射频条件下的各种测试验证。以下对该中频雷达回波模拟器的实现方法予以详细阐述。
1 回波信号理论分析
按照设计要求,该模拟器需要模拟脉冲单频、脉冲线性调频、步进频、步进频+线性调频共四种波形的信号。其中,步进频又包括顺序步进频和随机步进频两种类型。这些波形的雷达回波信号,均可以统一表示为式(1)的形式:

式中:c为光速;N为相参帧的脉冲总个数;i表示相参帧内的第几个脉冲;To为脉冲宽度;Tr为脉冲周期;fc为相参帧内首脉冲的载频;△f为脉冲间最小步进频差;bi△f为第i个脉冲在初始载频基础上的频率变化(仅适用于脉间频率捷变波形,非脉间捷变波形则bi=0);k为线性调频波形时的脉内调频变化率(非脉内线性调频则k=0);Ro为目标当前距离;v为目标当前速度。
由以上分析可知,无论上述何种波形,均可根据式(1)计算脉冲的延时、每个脉冲的脉内初相、以及每个脉冲的载频等参数,并对这些参数在与产品同步的基础上予以实时控制来进行模拟实现。根据发射波形,还要决定是否添加脉内频率线性调制。
2 回波模拟器系统设计
根据系统需求和前述雷达回波信号理论分析,该中频雷达回波模拟器(以下简称模拟器)采用了如图1所示的系统实现方案。
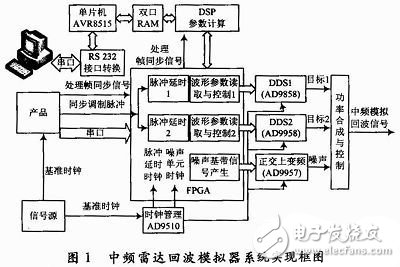
该模拟器通过单片机(AVR8515)与上位机进行异步串行通信,单片机完成通信协议的解包、打包等过程,接收上位机中用户设定的目标和干扰参数,发送模拟器的实时模拟状态信息给上位机。系统以DSP(ADSP-21060)作为脉冲参数的实时计算单元,单片机与DSP问通过双口RAM进行信息交换。DSP得到两个目标的模拟参数后,根据参数变化的时间节拍,计算一个相参帧两目标的各脉冲的初相、载频、脉冲延时等参数,并写给双口RAM。系统以FPGA(XC2V3000)作为信号处理与控制单元,FPGA读取后,在产品提供的处理帧同步信号和同步调制脉冲控制下,结合产品串口传过来的波形类型的信息(如:脉内单频还是线性调频),形成两个目标的延时脉冲,并控制两个目标各自的DDS(AD9858)信号产生单元,产生出两个目标信号。带限的高斯白噪声的数字正交基带也由 FPGA产生,并同步AD9957的数字正交上变频功能将基带调制到所需的中心频上。目标1、目标2和噪声信号的合成由模拟电路实现,并实现一定的功率控制,最后输出所需的中频雷达回波信号。模拟器系统各单元时钟的相参性至关重要,由专用时钟管理芯片(AD9510)产生 FPGA,AD9858,AD9957的工作时钟。
3 关键模块设计
3.1 数字延时模块
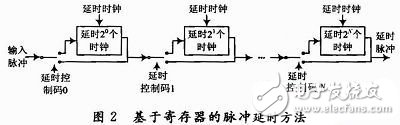
对于脉冲的数字延迟的实现,方法1是将DSP计算得到的延时时钟个数值D,转换为N位的二进制码,利用二进制码进行控制。可采用如图2基于寄存器的方法实现,这种方法优点是没有固定延迟,最小可实现零延迟。但当N增大时,此法耗费的FPGA触发器资源呈几何级数增加,因此,不适用于需要实现很大延时的场合。
方法2是采用如图3所示的存储转发的方式,具体是:将输入的待延时脉冲,用延时时钟采样后,以左端口地址A在每个延时时钟周期递增加1写入单bit的双口RAM中,右端口以地址B在每个延时时钟周期递增加1进行按序读取,左右端口操作到(2N+1-1)的上限地址后自动返回0地址继续各自递增操作。地址 A和地址B满足:B=A—D。D为需要的延时时钟个数值。当A《D时,取负数的补码作为地址B。

方法2避免了大延时情况下触发器资源过度耗费,但存在固定延时,另当延时时钟频率很高时,双口RAM的读写速度难以满足要求。因此,本系统在实践中对方法2进行了改进设计,如图4所示。
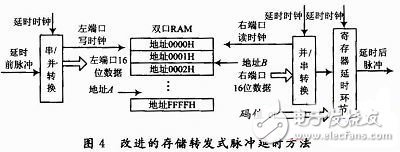
本设计将待延时的脉冲经延时时钟采样后,经串并转换形成16 b的数据,每16个延时时钟完成一次串/并转换,并输出一个16 b宽度的双口RAM的左端口写时钟,地址A仍按序累加。将地址A末位补上四个“1”构成宽地址x;x—D=Y(补码形式);式中:D为DSP计算的延时时钟个数值。将Y(二进制)的低四位提取出来作为码值C;其余高位构成图中双端口RAM的右端口读地址。其读时钟由图右的并/串转换单元每16个延时时钟周期输出一个脉冲;并/串转换单元将读出的16位数据转换恢复为脉冲,经过如图1寄存器方式实现的4位寄存器延时环节(控制码为码值C)延时后,输出延时后的脉冲。
该方法将双口的读写时钟降速到延时时钟的16分频,大大降低了双口RAM的速度压力,更易于实现。另16 b的双口RAM也可借助片外双口RAM实现,降低对FPGA存储资源的依赖。该方法的缺点是有更大的固定延迟,虽在延时大时可预先由DSP修正控制值,但对要求延时小于其固定延时的情况则无法适用。本系统综合采用两种方法解决,即:DSP输出码值的最高位决定延时方法的切换,当需求的延时大于固定延时时则采用图4的方法;而需求的延时小于固定延时时采用图2的寄存器法。
3.2 数字噪声基带产生模块
本系统噪声基带信号的产生采用数字技术,在FPGA内完成,实现方法如图5所示。
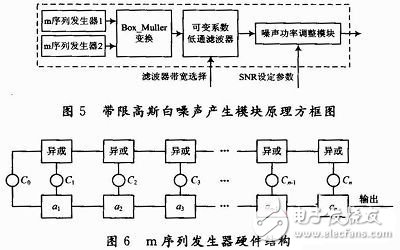
根据随机信号理论,对均匀分布的随机数进行白化处理,可实现具有良好统计特性的高斯白噪声。系统首先采用2个独立的m序列发生器产生[0,1]区间上均匀分布的伪随机数,m序列发生器的硬件结构如图6所示,其中Co和Cn为对应m序列多项式的系数,取值为0和1。
然后将产生的一对伪随机数通过Box_Muller变换可以得到一对相互独立的符合标准正态分布的伪随机数m和n,正好作为噪声产生器的同相分量和正交分量。Box_Muller变换公式为:

式中:x,y即为前述2个互相独立的在(0,1)上均匀分布的伪随机数。
由于Box_Muller变换需要用到两个非线性函数,而非线性运算很难在实际数字电路系统中实现,故实际中需要构建相应查找表实现非线性运算,分别记作sqrt_lut和sincos_lut。设sqrt_lut和sincos_Iut的输出量化数据长度为L1和L2位,独立变量m和n的定点长度分别为N1和N2位。则当采用均匀量化方案时,sqrt_lut和sincos_lut所需的存储空间分别为2N1×L1和2N2×L2。可以看出,如果直接实现查找表功能,当N1和N2较大时,对应的存储空间是相当可观的。
为了压缩存储空间,对sincos_lut,可以只存储第一象限的正余弦值。其他象限则通过符号调整得到,这样可以将sincos_lut占用存储空间减少到原来的1/4。更进一步,还可以对非线性曲线进行分段折线近似,在实际查找表中只存储各折线段的起始位置及对应斜率。也可以大幅度减少所需查找表的数量,该策略同样适用于sqrt_lut查找表。
得到一对相互独立的符合标准正态分布变量m和n后,还要对其进行低通滤波,以适应对应的信号带宽。由于I路与Q路的滤波特性完全相同,为进一步节省资源,可采用一个支持双通道操作的滤波器同时完成I路与Q路的滤波。这可以通过ISE集成开发环境中Core Generator中的FIR IP核来方便实现。滤波器系统可由上位机根据所需带宽,传递相应系数给DSP,继而传递给FPGA。
噪声功率调整模块可根据设定信噪比的不同,乘以相应系数,对产生的带限高斯白噪声幅度进行调整。
4 结论
本系统基于自主产生的原理,选用DSP和FPGA为核心处理器,通过合理的算法设计,实现了可兼容多种雷达波形的中频雷达回波模拟器的设计,采用改进的基于存储转发的数字脉冲延时方法,在达到8ns的最小延时步长的同时,降低了对系统的硬件要求。系统的另一个关键模块是数字噪声发生器,其参数可以进行实时修改,极大地提高了噪声发生器的灵活性,与其他同类型设计相比,具有工作速度快,资源利用率高,硬件结构简单等特点。最后采用DDS、数字正交上变频等器件,实现了精确的复杂频率调制、相位调制和幅度调制,保证了系统的灵活性、高兼容性和集成化程度。