0 引言
船用电机由于工作在环境温度高、湿度大、有油污及振动大的恶劣环境中,其整体使用性能及技术工况会逐步下降,一旦电机发生故障,就可能导致动力系统和电力系统服务中止,从而威胁船舶航行的安全。因此,基于LabVIEW平台开发的船用电机故障检测系统,能及时、准确地诊断出电机故障,具有广阔的应用前景。
虚拟仪器是一种以全新的理念来设计和发展的仪器,与传统的仪器相比,性价比高,且在数据采集方面具有广泛的应用。把虚拟仪器技术运用到对故障信号的采集分析处理中,一台PC机,配上数据采集卡、信号调理电路,及LabVIEW软件就能开发出一套完整的数据采集分析处理系统,可以完全取代传统仪器。
1 故障信号的分析方法
电机出现故障时,往往能通过其振动信息反映出来,故障信号特征提取是检测的第一步,也是关键因素。当电机处于复杂的多噪声系统中时,包括机械噪声和电气噪声,传感器往往会采集到各种系统存在的噪声,但其中仅有一部分是与电机故障有关的,通过小波除噪,形成位于不同频率上的带通滤波器,这样可以在时间轴上定位各个噪声的种类,滤除掉无关噪声,筛选出的有用噪声特征送入小波变换多分辨率分析。
传统的基于傅里叶变换的频谱分析法是振动信号分析中最常用的方法,它仅适应于分析干稳信号,但故障信号中往往含有大量的时变、短时突发性质的成分,人们提出了短时傅立叶变换,其虽然具有时间频率可变性,但时间频率的大小是固定的,与振动信号的时间频率大小可变不相适合,因此,也不能满足故障信号特征提取的要求。小波分析,作为一种时频分析方法,对不同的频率成分采用不同的时间分辨,通过伸缩和平移运算,达到高频处时间细分,低频处频率细分,对于电机故障分析,尤其是对突变信号分析效果显著。
2 系统结构
系统设计的工作原理是采用振动诊断法及小波变换和虚拟仪器技术相结合的方法,其中硬件部分是由数据信号采集部分和数据信号处理部分组成。振动传感器、信号调理电路和数据采集卡组成数据信号采集部分;装有LabVIEW程序的PC机主要完成对数据采集卡的配置及对采集的数据进行存储和处理。系统硬件结构框图如图1所示。

2.1 传感器
系统采用压电式加速度传感器,该传感器具有非常高的输出阻抗,同时其输出的电荷量非常小,引起需要高输入阻抗同时高增益的放大器。因此,信号调理电路采用的是电荷放大器,电荷放大器要求输入阻抗极高,同时要求输入的偏置电流极小,这样才能尽量地减少测量的误差。
2.2 信号调理电路
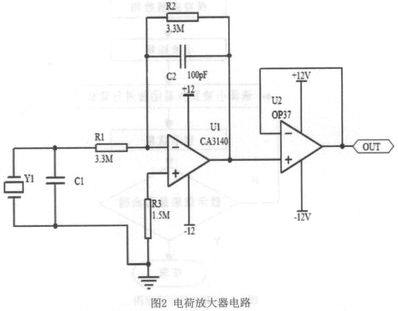
本电路设计的电荷放大器如图2所示。其中第一级电荷放大器采用的必须是高输入阻抗低偏置电流的运算放大器,一般采用FET前级。这里采用BiMOS前级的运算放大器CA3140,其输入阻抗高达1.5T Ω,输入的偏置电流仅仅有10pA,增益带宽积有4MHz。电路中的C1是连接传感器和放大器输入端的屏蔽电缆的自身电容,一般选用特氟龙绝缘的屏蔽电缆。R1和R2构成了反相放大器的调节增益的电阻,二者确定的放大器的直流电压增益为1,R1的阻值取值较大,为了保证放大器拥有较高的输入阻抗。R3是为了平衡输入端,保证良好的共模抑制比。后端使用宽带运算放大器OP37作为电压跟随器,从而保证了可靠的带宽。该放大器的输出与传感器的输出电荷以及反馈电容C2有关,如式(1)所示。C2储存电荷,因此C2应采用低泄漏高精度的电容,一般采用聚苯乙烯电容或者镀银云母电容。另外,这些电容具有非常低的温度系数,因此特别适合温度变化剧烈的场合。另外由于电荷放大器放大的是电荷,因此周围的泄漏电流对测量结果的影响很大,必须做好屏蔽,同时运算放大器的输入端需要悬空焊接,避免印制电路板上的电流泄漏影响。

2.3 数据采集卡
数据采集设备的作用是将传感器采集的、经过信号调理电路后的模拟信号,转换为计算机可以处理的数字信号。对于数据采集器的采样率要根据奈奎斯特采样定律和前级传感器电路的输出信号频率来决定。考虑前级传感器的电路的输出:压电加速度传感器的输出接近于冲击响应,因此其占用的频带较宽,一般可以达到100kHz。根据奈奎斯特采样定理可知,采集频率为f的信号时,所需要的数据转换器的最低采样率为2f,实际中为了保证信号的频谱完整性,一般采用5f的采样率进行采样。
3 数据的处理分析
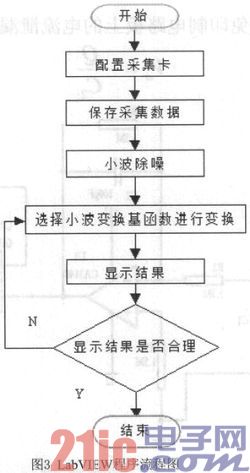
通过LabVIEW软件编写的上位机程序实现对硬件采集数据进行分析和处理。流程图如图3所示。通过采集数据、保存数据、对数据进行除噪处理,选择合适的小波基进行小波变换,检测出特征故障信息。
3.1 小波除噪
小波除噪程序调用LabVIEW软件中小波工具包中的Wavelet Denoise.v进行处理,其程序框图如图4所示。实验分别对含有白噪声的方波和具有奇异点的正弦波信号进行滤波,并与一般的巴特沃兹滤波器对比。采用LabVIEW自带的小波工具包实现小波滤波器,设置阈值为软阈值,基础小波选用bior2_2,实验结果如图5所示。

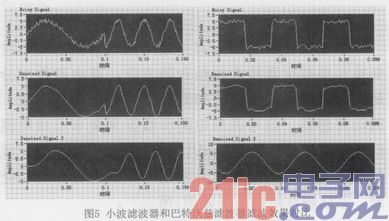
图5中左右两个图最顶层皆显示为原始夹杂白噪声的信号,中间一排为小波滤波器的滤波结果,最下面一排为4阶巴特沃兹滤波器滤波的结果。可见,1)对于左图有奇异点的信号而言,虽然两种滤波器都可以有效地消除噪声,但是巴特沃兹滤波器却把奇异点滤除了,导致了信号信息的丢失,而小波滤波器却可以完好地保留奇异点信息。2)对于右图方波信号而言,巴特沃兹滤波器造成了严重的失真,而小波滤波器则保留了较为完好的方波波形。因此,实验表明系统设计的小波除噪程序能较好地对信号进行除噪。
3.2 小波变换
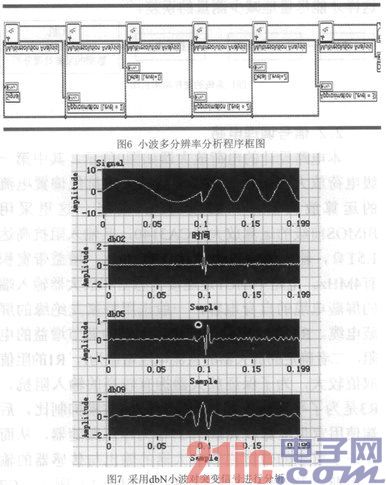
电机突发振动产生的信号经小波除噪后送入处理分析,采用小波多分辨率分析的方法,图6为小波多频率分析程序框图。实验用的时域波形如图7第一行所示。在开始电机转速为10r/s,在0.1s的时候突然发生转速的改变。实验依次采用了db02、db05和db09三个不同的小波,变换结果如图7第二、三、四行所示。比较其结果,db02小波的结果中幅值变换点处所占用的时间跨度最小,因此可以最精确的确定时间位置,检测效果明显。
4 结论
本文通过分析电机故障信息,采用了小波变换对采集的数据进行除噪和特征提取,本系统设计了主要硬件电路,然后利用LabVIEW平台对数据采集卡的配置及对采集的数据进行存储和处理,实验结果表明,本系统能快速、准确地诊断出船用电机故障及时间,具有良好的应用前景。





















