高精度超声倒车雷达的设计
时间:11-25 11:19
查看:688次
下载:162次
简介:
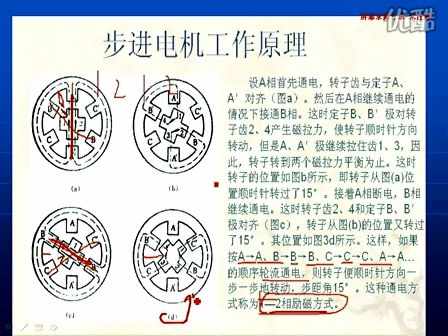
为解决超声倒车雷达指向性不足和存在探测盲区的缺点,设计使用步进电动机驱动小波束角超声传感器做扇形扫描探测的办法。设计中使用步距角为7.2°的步进电动机驱动波束角为5°的超声传感器在每一个步进角度上进行测距。结合测距的角度和测得的距离就可得到准确的障碍物位置信息。并且,由于传感器的有效探测角度大于电机的步进角度,所以每一次测距的探测范围会相互交叠,消除了探测盲区的存在。实验证明,使用步进电机驱动超声传感器进行探测,其准确度为传统倒车雷达的6倍以上。