一个完整的单片机系统,通常包括键盘输入、显示输出、打印输出、数据采集等许多功能模块。这些功能模块一般是通过I/O端口实现与单片机的数据交换,但是单片机的I/O端口有限,且一般用来处理数字信号,从而产生了总线式传输模式。
现在大多数单片机都是传统的三总线结构,即地址,数据,控制三总线。由于方便控制,三总线得到广泛的应用。但是作为并行总线,它也有一定的局限性。不适合远距离的传输。与I/O口的数目存在矛盾。随着电子技术的进步,发展出很多新的总线接口,如USB、I2C、CAN、SPI、1-Wire等。这些总线的特点都是串行接口,只需要几根甚至一根线就可以实现数据的传输。本文通过对支持SPI总线的AD器件MAX189性能分析,简要介绍了SPI总线在单片机系统中如何应用,并利用其制作一款简易的电压表。
一、SPI总线简介
SPI(Serial Peripheral Interface)是MOTOROLA公司提出的同步串行总线方式。因其硬件功能强大而被广泛应用。在单片机组成的智能仪器和测控系统中。如果对速度要求不高,采用SPI总线模式是个不错的选择。它可以节省I/O端口,提高外设的数目和系统的性能。标准SPI总线由四根线组成:串行时钟线(SCK)、主机输入/从机输出线(MISO)。主机输出/从机输入线(MOSI)和片选信号(CS)。有的SPI接口芯片带有中断信号线或没有MOSI。图1给出了SPI的典型时序图。

SPI主要性能如下:
全双工,三线同步传输 1.05Mbit/s的最大主机位速率 四种可编程主机位速率 可编程串行时钟极性与相位 发送结束中断标志 写冲突保护 总线竞争保护
二、MAX189芯片
MAX189是美国美信公司设计的一种12位串行A/D转换器。其内部集成了大带宽跟踪/保持电路和串行接口。转换速率高,功耗低,精度高。并且有SPI、Microwire和TMS320兼容的4线串行接口,与微处理器接口。只需要很少的口线,很节约资源。
MAX189的特点:
三线高速串行接口,12位分辨率 8.5 us逐次逼近型ADC 单一5V工作电压,工作电流1.5mA。关断电流2uA 0-5v模拟输入电压范围 使用片外时钟源 外置参考电压 内部跟踪/保持电路,75ksps采样速率 1/2LSB整体非线性度
MAX189的时序如图2,表1给出了MAX189引脚功能。
PIN 名称 功能说明 1 VCC 电源输入,+5V(±5%) 2 AIN 模拟电压输入端,0-REF。 3 /SHDN 三电平关闭输入端,低电平关断 4 REF 用于模拟信号的基准电压端,使用外部基准源时用作输入 5 GND 模拟和数字地 6 DOUT 串行数据输出端,数据在sclk的下降沿输出 7 /CS 片选,低电平有效 8 SCLK 串行时钟输入端(最大5MHz)
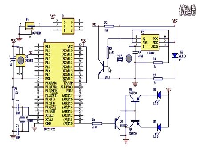
该简易电压表电路采用不带SPI接口的AT89C2051单片机,其指令系统与51系列完全兼容。可以通过软件模拟SPI时序,包括串行时钟。数据输入和输出。来实现对A/D器件MAX189的操作。所测电压经过单片机的处理,采用三个七段数码管显示。采用SN74LS164扩展I/O口。MAX189的2脚为待测模拟电压输入端。图3是简易电压表的原理图,其中A为数码管显示电路,B为A/D转换部分电路。
MAX189可以工作在两种模式下。即普通状态和关断状态。如果将SHDN置低电平。器件处于美断状态,电流小于10 uA。当把SHDN置高电平或悬空。器件就可以被操作。此时,CS在时钟下降沿启动转换.在时钟SCLK的每一个上升沿把一个最高位为“1”的控制宇节的各位送入输入移位寄存器.并启动串行时钟.开始将输入电压值逐次逼近转换。它用输入跟踪/保持(T/H)和12位逐次逼近寄存器(SAR)构成的电路系统将模拟信号转换成12位数宇信号输出。T/H电路不需要外部保持电容。输出数据按照高位在前.低位在后的顺序。在12个SCLK的每一个下降沿决定逐次逼近的各位并将数据送到Dout端。每一位转换结束后Dout由低电平变为高电平。(转换过程中不能对SCLK操作)按照时序要求。每输入一个(移位)脉冲。下降沿取出一位数据。单片机读取并做处理。读出12位数据后,可以开始下一次转换。
AT89C2051的串行端口处于模式0。数据的发送和接收都是通过RXD引脚(这里只用来发送数据).TXD则负责送出移位脉冲。其数据位由LSB开始发送/接收8个位。波特率固定为fosc/12。SN74LS164负责接收串行口发送的数据。在传输8个位后。其将数据并行送出驱动数码管.显示所测电压值。
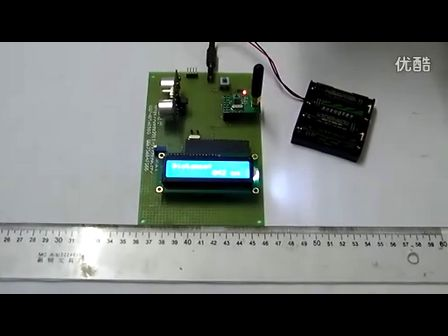
该电压表小巧,方便,精度高。程序运行比较稳定。误差在0.01V数量级。(感谢在设计过程中司佑全老师的给予的悉心指导)
源程序
该程序的作用是是该电路能测量0-5V的电压.并用数码管实时显示。
;占用p1.5,p1.6,p1.7作为模拟SPI时序与MAX189连接。
sclk equ P1.5;定义缓冲区
cs equ p1.6;
dout equ p1.7;
buf equ 50h;
org 0000h
ajmp begin
begin:
acall init;初始化片内资源
acall load_data;初始化缓冲区
acall adc_init;对AD的操作
acall con;数据处理子程序
acall display;显示子程序
acall load_data
ajmp begin
init:mov 36h,#00000000b;加载初值,取高8位数据
mov 37h,#00000000b
mov r1,#8
mov r3,柏
mov scon,#00h
mov ie,#82h
setb ti
ret
adc_init:acall init_ad;AD的控制
acall wait
acall read_ad
ret
init_ad: ;启动AD转换
setb cs
clr cs
ret
wait: ;等待AD转换的结束
jnb dout,wait;
ret
fasong:jnb ti,$;发送数据
clr ti
mov sbuf,a
ret
read_ad:
Ioop1:
setb sclk
clr sclk
mov C,dout
mov A,36H;
rlc A
mov 36H,A
djnz r1,loop1;读高8位,存放在36h
loop11:
setb sclk
clr sclk
mov C,dout
mov a,37H;
RLC a
MOV 37H,a
DJNZ R3,loopll;
mov a,36h
setb cs
ret
load_data:mov buf,0fch;扫描显示器,显示数据
mov buf+1,#0fch
mov buf+2,#0h
mov buf+3,#0h
ret
con:mov B,#5
p AB
mov B,#10
p AB
mov DPTR,#table1
movc A,@A+DPTR
mov buf+1,A
mov A,B
mov DPTR,#TABLE
movc A,@A+DPTR
mov buf,A
ret
display:mov r0,#buf;显示
lop:mov a,@r0
acall sent
inc r0
cjne r0,#buf+8,lop
acall delay
ret
sent:jnb li,$发送数据
clr ti
mov sbuf,a
ret
delay:mov r7,#230;
d1:mov r6,#13O
d2:djnz r6,d2
djnz r7,d1
ret
table1:db 0fdh,61h,0dbh,0f3h,067h
db 0b7h,0bfh,0e1h,0ffh,0e7h;带小数点的八段显示数据(0--9)
table1:
db 0fch;0
db 060h;1
db 0dah;2
db 0f2h;3
db 066h;4
db 0b6h;5
db 0beh;6
db 0e0h;7
db 0feh;8
db 0f6h;9 ;不带小数点的八段显示数据
end