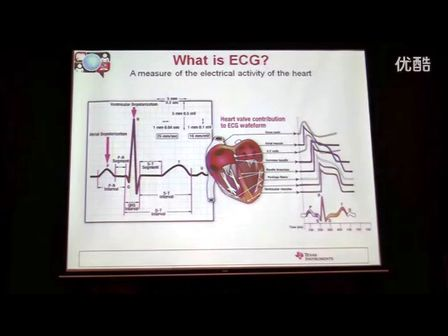
在日常生活中,盲人基本都是通过普通的盲杖来辅助行走的,有的甚至只是一根普通的长杆,它只有接触才会发觉局部的障碍物,存在着明显的不足。导盲犬虽然也是一种可靠的手段,但是维护成本太大,在盲人群体中的利用率并不高。我们所设计的电子导肓拐杖是基于STC89C52单片机控制,利用HSR-04超声波测距和WT588D语音模块结合固定在定制拐杖上的智能语音提示拐杖。当盲人的前方有障碍物的时候会被该系统检测到时候,从而提示语音供使用者判断。和传统拐杖相比它具有障碍提示功能,具有可折叠性,占用空间小,携带方便。和市面上销售的普通电子拐杖相比它的成本较少,测量范围广,具有功能可扩展性,功能更加齐全。
1 导盲拐杖系统功能结构图
1. 1 系统总体设计
本系统主要由主控制模块STC89C52单片机、电源模块、超声波模块、语音模块、发声喇叭等组成,软件部分包括单片机中断程序、语音模块的接受信号处理程序和语音芯片驱动程序。系统功能结构图见图1所示。

超声波模块1检测上方的障碍物,超声波模块2检测脚前的障碍物,当检测到障碍物在设定需要提醒的距离内时,主控制器给语音模块发送控制信息,从而控制喇叭发出对应语音提示。供盲人提前做出应对,避免发生危险。
1.2 电源模块的设计
因为单片机工作的电压为+5 V,考虑到盲人生活有诸多的不变,并且所处环境复杂,对电源的容量,稳定性和使用寿命都有较高的要求。所以本设计采用了使用市面上性能稳定的大容量POWERBANK(一种电源品牌)的+5 V移动电源,含有通用USB充放电接口。另配备了一个4节5号电池的电池盒,系统在紧急情况下允许短时间直接使用。
1.3 复位电路
51系列的单片机通过外部电路复位,在RST引脚(复位引脚)持续10ms以上的高电平,有上电复位和按钮复位,本系统采用上电复位,即每次打开开关就初始化一次,保持设备不受上次使用的干扰。
1.4 时钟电路
为了提供精确地参考时间信息,单片机需要外部提供时钟电路,本系统采用12 MHz晶振和两个30PF的陶瓷电容,以满足设计要求。由于电容在使用过程中会发热且晶振为精密器件,所以焊接时候应彼此保持适当距离,以保持时间的周期真实可靠。
2 导盲拐杖各部分模块设计
2.1 主控电路
控芯片引脚通过P3^0与语音芯片进行通信,控制语音的输出,P1^0和P1^1接超声波的Trig口,P3^2和P3^3接超声波传感器的Echo口,负责超声波模块信号的发送与接收。
如图2所示,在使用过程中,超声波开始定向发出超声波,主控模块处理芯片开启中断,当检测到障碍物在设定需要提醒的最大距离内时,中断结束,从而得到超声波在障碍
物之间的往返时间,主控模块计算出障碍物距离长短,并根据得到的距离的长短选择相应的触发信号,将信号发送给语音模块。调用语音模块的相应信息。
2.2 扬声器部分电路
由于发声器芯片本身支持5 V的PWM(Pulse Width Modulation脉冲宽度调制)输出,故喇叭外不用外加电路。即简化了电路又节约了电能的消耗。
2.3 超声波测距模块
超声波是高于2 000 Hz的声波的范称,因其频率下限大约等于人的听觉上限而得名。它的能量集中性能好,方向性强,能穿透多种介质,在医疗和工业探伤中均有应用,HS— SR04超声波模块能把电能经过转换成声波发射出去。并自动检测回波,其精度可达1 cm2,距离可达2~450 cm。模块的发射端为trig,接收端echo。当超声波在空气中遇到障碍物时,就会被反射回来,然后被接收器收到。超声波在空气中的传播速度为已知,来回穿越时间极短可认为距离是相等的,利用程序测量出发射声波和接收声波的时间差(T1+T2),空气中传播速度已知,即可计算出发射点到障碍物的实际距离 S。
距离换算公式:
S=C*(T1+T2)/2(C=340 m/s)
2. 4 WT588语音模块
系统的语音提示部分由WT588语音模块完成。其主要特点;28脚模块封装,可通过更换存储器以获得不同长度的语音存储时间;内嵌独特的人声语音处理器,使语音表现极为自然悦耳;支持加载6K~22kHz采样率WAV(微软公司开发的一种声音文件格式)音频;PWM输出可直接推动0.5W/8Ω扬声器,推挽电流充沛;通过真人录音,把语音信号用音频软件处理后,通过与其匹配的专业下载软件,把语音按照WAV的格式,按照预先计划的顺序烧录进模块内。完成语音的装载。通过软件的设置可以控制任意一段语音在合适的时候进行播放。在一线串口下,通过定义STC89C52单片机的P3^0与语音模块的P0^3相连接,实现单片机与语音芯片的通信,从而在逻辑上把语音模块和单片机构造成一个整体。在主控芯片控制下,单片机不断分析从超声波传感器获得的数据,经过计算分析后向语音芯片发送不同的语音控制指令,使其距离障碍物的距离和不同的提示音连接起来,实现不同情况下的多种语音提示。
本设计一共录制了6段语音,分别为正前方障碍的远中近,和脚下附近的远中近。在单片机芯片获得了相关数据后,开始从芯片内部读取语音,通过喇叭发生。拐杖使用了两个超声波模块,分别在上部和下部,经测试使用后会较的测量范围广,障碍定位更加准确。
3 程序设计
系统软件主要完成障碍的探测,距离的计算,和语音的提示功能。其中主程序又包含了以下子程序,初始化子程序,超声波的产生和接收子程序,计时与计算子程序,判断子程序,语音录入子程序其工作流程如图6。在程序执行过程中,为了补偿在同一方向上前方和脚下对同一个障碍的的误差(拐杖在前进过程中是倾斜使用的),故对于超声波模块2进行了距离补偿20 cm。经过测试发现能很好地满足要求。即使障碍物比较大,模块1和模块2同时都接收到了数据,通过模块的合理安装和程序的精心设计仍可保持两个模块互不干扰,得到各自的精确数据。从而保证测量和判断环境的准确性。
另外考虑到节约能源,在每次超声波探测后都会进行停顿0.5 s,既可以很好的满足设计要求又能节约能源,延长行驶距离。
4 拐杖的设计与安装
由于盲人需要随身携带导盲杖,为此,导盲杖的设计应轻巧实用。拐杖采用铝合金或者不锈钢的材质,内部中空,可折叠、可伸缩、质量轻,简单便捷。采用两种组合结构以满足不同人的需要,一种内部用强力皮筋连接,分为多节可以折叠使用。另一种是多节,各节螺旋结构相连可伸缩,可以根据不同的身高和年龄段适当调整高度。手柄用传统的贴合设计,各节结合部分附加强力弹簧在行走过程中亦可适当助力。外部用相对廉价的反光纸取代了警示灯,盲人不能分辨白天黑夜,市面上的光敏元件廉价的起不到节约的作用,效果好的对成本有影响,并且对于独立拐杖来说电源是个宝贵的资源,经过夜间测试在有灯光的地方距离20 m以外均能发现拐杖的存在。提高了盲人夜间行走的安全性。
安装:本设计为了得到正前方的详细信息,采用了两个超声波传感器,分别探测成年人在实际环境中腰部以上(超声波模块1)的障碍和膝盖以下(超声波模块2) 前方的的障碍。拐杖在实际应用中为倾斜使用,经过试验后两个模块均水平向下倾斜30°附近安装可基本满足不同身高段的使用者要求,顶部尽量靠近手柄部分,底部的应距离底座5 cm以上,防止行走过程损坏设备。语音模块在一侧,迷你发生器在另一侧,电源在背面,含有电池槽和固定设备。且主控模块和语音部分均留有扩展接口,根据附带的技术资料。便于有一定技术基础的使用者根据自身实际情况调节产品,扩展性能。达到最佳效果。
5 结束语
经过一系列的实地测试,本设计能够在规定安全距离内对碰到对正前方障碍物和脚前方凸起的路面进行语音提示,并且视情况给出不同的提示语音,夜间在有灯光的地方普通人能够对拐杖做出准确识别,本设计帮助了盲人更好的适现代生活,切实保障了盲人在前进路上的人身安全。目前本设计只能含有汉语提示和检测正前方的障碍,不能检测地面深坑和左右环境情况,下一步主要会完善语音提示的种类模式选择使其能够面对不同的国家和语言种族都能使用,也会努力嵌入可以定位的 GPS定位功能,使盲人能够随时随地的把自己的信息反馈给关心自己的人。