1引言
公路划线机是用来在高等级公路及城市道路上划各种路面标线的专用机械。在道路的养护过程中也用于在旧标线上划新标线[1].目前划线机种类很多,它们分别应用于不同的场合,但其共同的特点都是先通过人工标线,然后进行机械喷涂。人工标线工作量大,且工作进度较慢,精度较差。针对这种现象本文介绍了公路划线机划线导向机器人,专门用于提供划线机较准确的路线,减轻了人工标线的工作量,提高了划线的准确度。
2划线导向机器人概述
划线导向机器人的系统基本组成:导向控制系统、电机驱动履带行走系统和涂料喷涂系统。本文划线导向机器人主要用于公路中线的划线导向,机器人两端安装有超声波测距模块,分别测量公路两边的公路沿到机器人的距离,通过西门子S7-200PLC软件程序的处理后得出的信号来驱动直流电机的运动,使机器人快速地往中线上靠近,进而在中线上行进。当行进稳定后,涂料喷涂系统中的喷枪开始对地面喷洒涂料,给划线机提供较准确的标线。机器人控制示意图如图1所示。
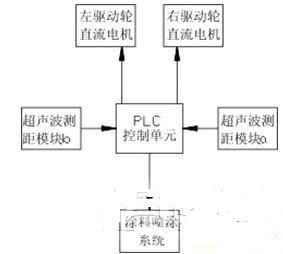
图1机器人控制示意图Fig.1 The diagram of control
3导向控制系统
导向控制系统基本组成:超声波测距模块和PLC控制单元。
超声波测距模块一般包括硬件部分和软件部分,硬件部分包括控制单元、超声波传感器、发射和接收电路等;软件部分即是固定在控制单元中的程序。目前市场上出现的超声波测距仪,可以稍加以改进,也可以满足本文要求。目前的超声波测距仪检测距离可达到10m左右,远远满足本文的要求。
本机器人左右两端分别对称安装一个超声波测距模块,左右两个传感器同时向两边发射超声波,通过比较左右传感器发射接收的时间差值来判断机器人是右偏还是左偏,进而控制驱动轮直流电机的运动,从而是机器人在公路的中线上行进。PLC控制单元在接收到两边超声波测距模块传送的数据后,将两组数据进行比较。如果右边的数据较小,发出的超声波在右边返回的用时较短,则机器人偏向中线的右边,那么右驱动轮比左驱动轮转速快,如此不断的调整,最后机器人位于公路中线上。稳定后,控制单元将此时的超声波传回的数据储存在存储区中,以后机器人的驱动轮速度就以此时的速度匀速行进,靠传感器实时传回的数据进行调整。调整范围限制在一定的值域内,超过该值域时,电机才转动开始调整机器人与中线的距离,使其尽快在中线上行进。
PLC控制单元软件包括:主程序、读超声波测距模块数据子程序和电机调整子程序。其程序流程图如图2所示。
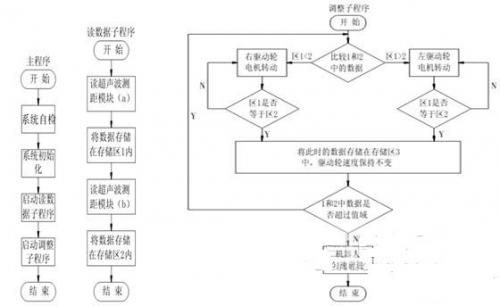
图2程序流程图Fig.2 The chart of program flow
4电机驱动履带行走系统
机器人的移动方式有轮式、步行式和履带式。步行式结构设计复杂且移动缓慢,但步行机器人可以适应条件较差的路面。轮式结构机动性强,但却只适用于平坦的地形。而履带式结构具有运动平稳、爬坡能力强、不易倾倒等特点;克服了轮式移动机构越障能力、跨沟能力差及打滑等缺点[2-3].
本文提出的划线导向机器人应用于路况较好的公路,但考虑到本机器人是找寻公路的中线行走,轮式结构虽然机动性较好,但其在路面适应能力上远不如履带式移动方式。结合各种情况本机器人采用两节并行履带连接方式,其移动方式类似坦克的行走机构。两边的履带安装在前后轮上,后轮由直流电机驱动,通过履带带动前轮一起转动。其结构示意图如图3所示。用履带式结构机器人不仅可以直行,而且可以利用履带的差动实现原地转向。该结构简单,不需要差动器,转向机构等。控制方便,转弯半径小,电机既可以提供前进动力,也可以提供转向动力[3].
驱动轮直流电机选择带减速器的直流电机,电压为24V.蓄电池的电压为24V,包括工作蓄电池和备用蓄电池。工作蓄电池不仅给直流电机供电,还给控制单元供电。备用电池用于工作蓄电池损坏或突然无电的情况下。

图3履带式移动方式结构示意图Fig.3 The structure of moving way
5涂料喷涂系统
划线机按标线所使用的材料分为:冷漆划线机和热塑划线机。冷漆划线机即在常温下进行喷漆,它有两种类型,即气喷涂式和无气喷涂式。气喷涂是靠压缩空气将漆雾化,然后通过喷枪嘴喷涂于地面。无气喷式划线机是利用专用高压泵对漆施加10~15Mpa的压力,然后通过喷枪喷涂于地面。热塑划线机是将热熔油漆或热熔塑料(有颗粒状和块状两种)在热熔罐中加热至使用温度后,再通过划线装置划于地面的。其划线装置的划线方式分为:刮涂式、挤压式和喷涂式[4].结合本文划线机划线导向机器人的应用重点是导向机器人给划线机提供标线,所以导向机器人的涂料喷涂系统不会像划线机上的喷涂系统那么复杂,只需要满足能够给划线机提供可以识别的标线即可。
本文涂料喷涂系统采用冷塑无气喷式,即在常温下利用专用高压泵和喷枪进行喷漆的方法。其基本组成有:高压泵、涂料箱、喷枪及其控制喷枪的电机。涂料喷涂工作过程:高压泵向涂料箱中进行加压,当控制喷枪的电机得到控制单元的指令时,电机开始工作并使喷枪喷出涂料。本系统安装在履带式底盘后部,喷枪安在中线上,机器人行走时,喷枪对准地面进行喷漆。
6总结
与目前传统的公路划线机划线过程相比,本机器人有以下几个特点:第一,本机器人实行自主寻找中线方向,不需要人为操作。第二,本机器人给公路划线机提供较精确的中线标线,不需要人工标线,大大地减轻了工人的工作量。第三,本机器人结构简单,PLC控制系统稳定性较强,能适应于恶劣的野外环境。
本文创新点:将PLC用于控制系统,适用于环境恶劣的野外作业,稳定性强。应用了履带式的移动结构,可应用于复杂的路况,机器人移动性能稳定。
![[四轴飞行器教程]适合新手的简单PID调节方法,任何飞控通用](/Uploads/2014_12/video/vi8fc8d028840bfa6c191d73d8eafcc08b_s.jpg)


























