核心提示:高龄化社会来临,使得独居老人照护问题日益受到重视,因此研究人员利用具备高控制和运算能力的微控制器(MCU),开发出可随时跟随独居老人并具备跌倒侦测、紧急通知和网路互动等功能的智能照护机器人,以提升居家照护品质。
台湾目前已逐渐迈入高龄化社会,多数子女工作在外,无法全心全意照顾老人,因此孤独在家中的老人照护就显得相当重要。有人选择聘请看护在家照料,抑或决定送至安养中心,但这些方法费用过高,而且子女也无法直接照顾亲人,显得较不放心。为有效解决此问题,可照护及关怀老人生活的电子装置遂日益受到重视,透过装置的监控及互动功能,不仅可让老人在家即能了解在外亲人的消息,而子女也能随时从中得到家中父母的健康与生活资讯。
老人关怀照护系统设计有居家的监控功能及和家人互动功能,透过网路服务,当老人有照顾需求时,可利用手势辨识功能呼叫机器人至身边;当想观看亲友在脸书(Facebook)上的消息及图片时,可利用脸书动态服务,即时得知亲友最新动态讯息,也可透过网路通话与远方的家人进行视频聊天;同时也可随时监控,当意外发生时可即时通知家人及医护人员进行处理。
该系统利用主系统芯片将Kinect所感测的骨架追踪、手势辨识及网路摄影的视频通话等感测后存取数值,再利用串列传输(USART)传送数值于主系统芯片,并做出距离等识别模式,进行跟随老人、控制马达与老人互动。
Kinect感测功能襄助照护机器人创新应用扩大
该系统创新性功能为跟随看护模式--Kinect骨架追踪和超音波定位、骨架判断--跌倒侦测、紧急通知--简讯传送,以及互动功能--手势辨识和网路视频(图1)。

图1 照护机器人理想互动功能
在跟随看护服务部分,该系统利用骨架追踪及超音波定位,当老人移动时,机器人便会跟随至后方进行照护,可随时判定老人是否跌倒,操作起来也十分方便。现有的跌倒侦测系统大都依赖摄影机或是使用者身上配戴的器材来辨别跌倒,该系统的跌倒侦测只须透过Kinect骨架追踪,即可判定是否跌倒。
至于紧急简讯传送部分,当老人判定为跌倒时,机器人会自动由主系统芯片发布简讯至指定家人手机中,亲人接收到消息后可立即做出反应或视频观看。而脸书动态及互动视频服务部分,该系统加装脸书动态服务及网路视频,老人即可关心在外子女的图片,并让亲友利用视频互动看见老人在家的状况,能有效拉近老人与家人的距离。
.跟随看护服务
照护机器人主系统利用芯片与Kinect进行老人互动与看护服务。智能型看护机器人可透过Kinect跟随于老人后方随时看护,利用Kinect本身的骨架识别,以判别正常状况时的骨架数量与动作。当老人不慎跌倒时,依骨架瞬间降下或消失为判别,再回传数值讯号给主系统,可即时透过紧急简讯功能送至子女的手机进行通知,家人则可透过网路视频进行查看老人在家中的状况,以免错过时间就医。
为即时反应与传送数值来跟随与保障老人的安危,看护系统透过主系统芯片提供USART,即可直接利用USART而不须再以串列周边介面(SPI)进行转换动作。跟随方面,则运用产生脉衝宽度调变(PWM)脉波来控制HB-25马达驱动器来驱动直流马达,由于控制波形即可正反转,就能在主芯片应用与结合出让机器人前后左右的动作与功能。
该系统还须使用PING超音波距离感应器(图2)来侦测距离,除应用PWM来进行声波传送与接收,也使用通用输入/输出来接收数值距离判断与Kinect骨架等数值。

图2 PING超音波距离感应器
利用芯片使机器人进行追踪,由超音波侦测距离,让主系统判断老人的位置,并命令马达动作,使机器人能进行跟随,可随时跟在老人的身边,注意是否有突发状况发生,挥挥手就能与家人视频通话等功能。
PING超音波距离感应器用于测量与物体间的距离,範围介于3cm?3.3m,容易装置于机器人或自动设备上。超音波感测器利用脉波产生,透过声波喇叭进行一发一收的动作来得到讯号的时间长短,也就是感测器发送讯号至物体而反射后所经过的时间,在经过运算后即能得到精準的距离。为实现追踪功能,超音波定位追踪方法利用主系统芯片产生脉波与判断,使超音波能自动追随物体,也更加稳定照护功能。
为可负载生活必需品,因此行走动力来源选择扭力较大的马达(IG-30GM)做为驱动,搭配耐高电流的12伏特(V)马达驱动芯片(HB-25)来控制直流马达,控制方式为脉波的宽度调变,控制两颗马达的正反转、时间差和转动速度等参数,芯片扮演重要的行动控制机能,车体的前进、后煺、转弯等动作。
.Kinect骨架判断
Kinect透过镜头即时撷取使用者的动作,之后并会接着解析相对应的指令。透过内建的红外线VGA镜头发出主动式雷射,在Kinect可扫描的範围内藉由雷射反射过程判断使用者位置,当使用者的身体部位识别完毕后,Kinect会将所撷取到的资料整理成一组骨架图,藉此对应于相关应用。
使用Kinect本身的骨架辨识功能,能模拟出老人的骨架,让主系统监控骨架与动作,判断骨架是否出现或是下降;判断特定动作,启动特定的功能,如图3为人体进入Kinect範围时会出现骨架识别,进而做出不同指令动作。
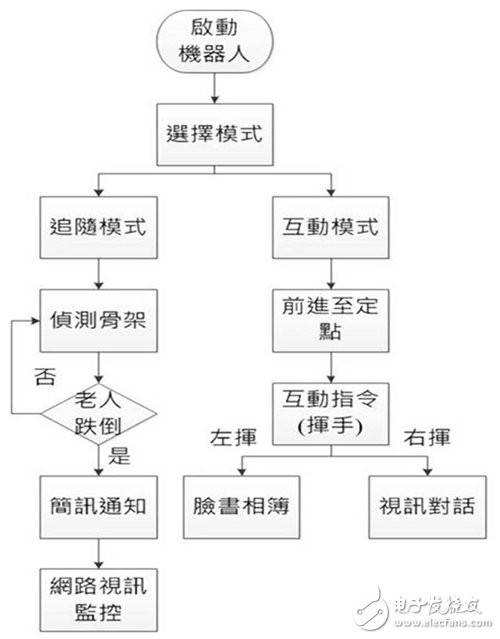
图3 机器人动作流程图
.紧急简讯传送
当老人发生跌倒时,主系统接受跌倒指令数值判断出Kinect所勾勒出的骨架是否下降或消失,并透过紧急简讯功能,立即发送简讯至子女的手机进行通知,家人在查看到简讯后能立即开启网路视频服务,可于第一时间了解家中老人的状况,并与老人进行对话。
此外,简讯功能可指定手机号码,且更改紧急联络人十分方便。
.脸书动态/互动视频服务
当老人需要照护机器人进行观看在外子女的动态或联络时,可透过手势辨识,呼叫照护机器人过来至身旁,机器人可透过手势动作判别进行脸书动态服务,可观看子女在外打卡或上传照片,也可利用网路摄影机及网路视频功能与在远方子女进行视频对话,随时知道彼此的消息。
执行完整测试项目机器人实现更安全老人照护
图3为该系统的动作流程图,以微控制器(MCU)做为核心控制(图4),进行数值运算与即时反应,利用微控制器的高运算处理速度来即时完成所有数值接收与指令,让机器人不会因延迟而导致行动不顺畅。
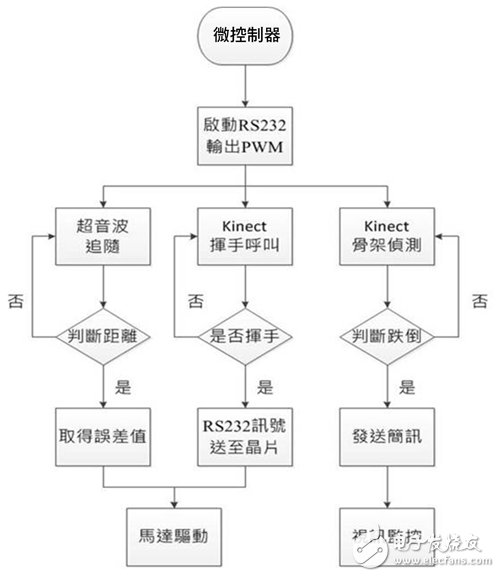
图4 微控制器动作方块图
主系统芯片还须与其他硬件结构说明,以主系统芯片出发,达到所有模组相互结合的应用,进而完成智能型照护机器人的设计与实现。在实作过程中须进行仔细调整与测试的项目,包括直流马达驱动控制、超音波定位角度追踪、Kinect指令动作方向和机器人追随安全距离。
.直流马达驱动控制
为让本系统达到行动照护,所以直流马达是必定需要的,并使用马达驱动器,控制起来只须调整脉衝宽度调变(PWM),以及马达的正反转、时间差和转动速度等参数,就能让照护机器人行动起来更加顺畅(图5)。

图5 直流马达测试及建置
利用测试方法让马达得以进行正反转动作,再将完成的马达驱动置于该作品底座,裡头包含自行设计的电路板、配置电源及最重要的马达驱动器等。
.超音波定位角度追踪
为能让机器人能自动追踪人体,自行简易设计出应用叁个超音波判断距离与方向,再与伺服器马达结合而形成的角度追踪,透过侦测叁种方向,马达就能精準追随并停止。
.Kinect指令动作方向
该系统结合Kinect进行骨架与动作侦测,手势动作则应用于开启脸书动态服务于网路视频功能,为方便开启功能,进而测试手势不同方向与动作。
.机器人追随安全距离
为能让跟随老人并维持距离追踪,以及Kinect角度侦判範围,测试不同距离来决定能最精準且侦测到数值的车身与老人间距,分别测试50cm、80cm、100cm叁种不同距离。
图6为该系统的正面摆设,其中包含笔记型电脑的放置,用来观看视频及骨架侦测观察画面。Kinect置于上方处,方便撷取整个骨架,并结合超音波进行人体追踪,置放叁颗以扩大测量範围。
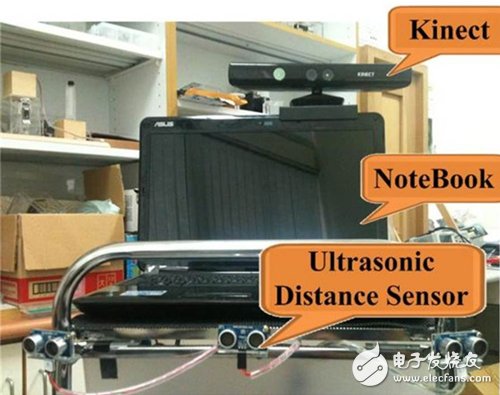
图6 照护系统正面硬件装置配置
藉由跟随功能达到即时监控,让老人在家中能降低危险发生,并利用本身置物柜以放取老人日常生活用品,达到即时拿取的便利性,以最人性化且智能的方式照顾好老人,未来也将会增加更多功能,来让服务更加完善。