0 引言
大部分实际控制工程都是复杂的高阶系统,通常可将其分解为若干个一阶惯性环节和二阶振荡环节的叠加。在研究复杂控制系统的过程中,往往通过主导极点和偶极子相消的方法,将高阶系统简化为二阶等低阶系统的组合,再根据对二阶控制系统输出和性能的分析,对控制系统偏差进行校正,从而获得满足设计指标和使用要求的高阶系统性能。因此,掌握二阶控制系统动态特性理论,构建二阶控制系统动态特性的测试系统,可大大简化系统分析,对控制系统的分析和设计具有重要作用。
Simulink 是一种以Matlab 为基础的实现交互式动态系统建模、仿真与分析的软件包,可以针对控制系统等进行系统建模、仿真、分析等工作,被广泛应用于线性控制系统、非线性控制系统、数字控制及数字信号处理的建模和仿真中。本文介绍基于Matlab/Simulink 仿真环境下,通过单位阶跃信号作用,利用仿真实例对二阶控制系统进行仿真研究,直接观察和分析二阶控制系统输出性能的变化,充分体现了Matlab/Simulink仿真直观和方便的特点。
1 二阶控制系统模型
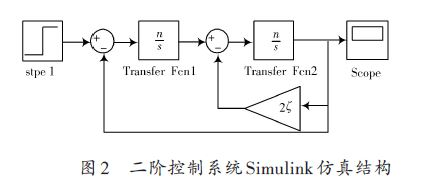
能够用二阶微分方程描述的系统称为二阶控制系统。在控制工程实践中,二阶控制系统十分常见,例如,电枢控制的直流电动机,RLC网络和弹簧-质量-阻尼器组成的机械位移系统等。此外,许多高阶系统在一定条件下,常常近似地作为二阶控制系统来研究。因此,详细讨论和分析二阶控制系统的特性,具有极为重要的实际意义。典型二阶控制系统数学模型结构如图1所示。

其闭环传递函数为:
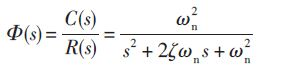
式中:ζ为系统阻尼比;ωn为无阻尼自然振荡角频率,单位为rad/s.二阶控制系统的动态特性可由以上两个参数描述。二阶控制系统在单位阶跃信号作用下,其输出响应可分为以下几种情况:
(1)当ζ=0时,二阶控制系统为零阻尼状态。系统有一对共轭虚根,系统单位阶跃响应为无阻尼等幅振荡曲线。
(2)当0<ζ<1 时,二阶控制系统为欠阻尼状态。系统的极点为共轭复数,位于S 左半平面。系统单位阶跃响应由稳态响应和瞬态响应两部分组成,稳态响应为1,瞬态响应为振荡衰减过程,振荡角频率由阻尼比ζ和无阻尼自然振荡角频率ωn决定,并且随着ζ的减小,其振荡幅度加大。
(3)当ζ=1时,二阶控制系统为临界阻尼状态。系统具有两个相同的实数极点,位于S 左半平面。系统单位阶跃响应为无超调,无振荡单调上升的曲线,不存在稳态误差。
(4)当ζ>1时,二阶控制系统为过阻尼状态。系统具有两个不等的实数极点,位于S左半平面,系统单位阶跃响应与临界阻尼情况相似,为无超调,无振荡单调上升的曲线,但它的过渡过程时间较之临界阻尼更长。
2 二阶控制系统仿真设计与研究
2.1 二阶控制系统仿真结构设计
启动Matlab 7.04,进入Simulink 仿真界面,根据二阶控制系统数学模型结构,设计二阶控制系统的Simu-link仿真结构如图2所示。双击各函数模块,在出现的各参数对话框内设置相应的参数,仿真时输入单位阶跃信号,起始时间为0,分别改变ωn 和ζ的值,点击simula-tion菜单下的start命令进行仿真,双击示波器模块观察仿真结果,得到系统的阶跃响应曲线,再进行分析ωn和ζ对系统动态性能的影响。
2.2 二阶控制系统单位阶跃响应与参数ζ的关系
设定ωn=10 rad/s 不变,改变参数ζ分别为0,0.25,1和2的二阶控制系统Simulink仿真结构如图3所示,输入单位阶跃信号,其仿真响应曲线如图4所示。从图中实验数据分析可以看出,响应曲线由上至下,依次为无阻尼等幅振荡曲线,欠阻尼振荡衰减曲线,临界阻尼和过阻尼无超调单调上升曲线。当0<ζ<1 时,二阶控制系统欠阻尼状态ζ变化的阶跃响应曲线如图5所示。随着ζ 的增大,系统单位阶跃响应的超调量减少,但上升时间加长,曲线峰值较大,因此,综合考虑超调量和上升时间两个因素,应选择ζ 接近最佳阻尼比0.707.


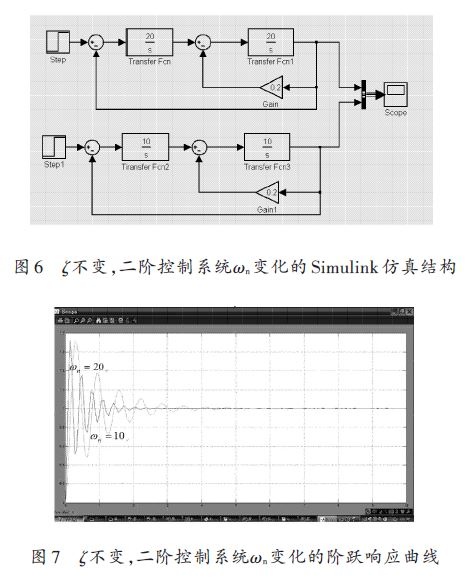
2.3 二阶控制系统单位阶跃响应与参数ωn的关系
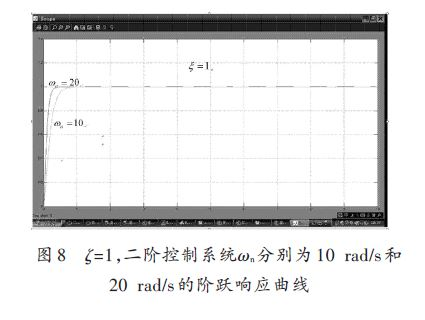
设定ζ=0.1 不变,改变参数ωn 分别为10 rad/s 和20 rad/s的二阶控制系统Simulink仿真结构如图6所示,输入单位阶跃信号,其仿真响应曲线如图7所示。从图中实验数据分析可以看出,当ζ=0.1 时,随着ωn 的增大,系统单位响应的振荡周期变短,其调整时间也相应地缩短;当ζ≥1 时,系统变成临界阻尼或欠阻尼系统,这时也有类似的结论,图8所示为当ζ=1时,ωn分别为10 rad/s和20 rad/s的二阶控制系统的阶跃响应曲线。
3 结语
基于Matlab/Simulink 环境的仿真分析方法,通过Simulink工具箱所提供的基本模块,不需任何硬件,在单位阶跃信号作用,利用仿真实例很好地实现了对二阶控制系统进行仿真研究,直接观察和分析二阶控制系统输出性能的变化,验证了二阶控制系统相关理论的正确性,在二阶控制系统实验教学和科研上有很大实用价值,充分体现了Matlab/Simulink仿真直观和方便的特点。