航模遥控开关电路图(一):单通道航模遥控器的构造
遥控装置一般应用于车模、航模等领域,用以实现对靶机、航模、玩具等的自动控制。下面介绍一种无线比例电机遥控器的制作方法。它选用易购元件,具有原理简单、性能可靠的特点。
电机遥控路的工作原理
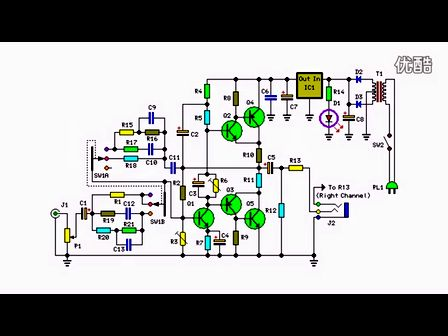
图1(下图)为遥控发射电路。555集成块与R1、R2、RP1、VD1、VD2及C1组成一无稳态大范围可变占空比振荡器。图示参数的振荡频率为50Hz左右,通过RP1阻值的调节,占空比的变化范围可达到1%一99%,由③脚输出50Hz方波信号。VT1及外围元件构成晶体稳频电容三点式振荡器,石英晶体的谐振频率选用27.145MHz。本电路采用石英晶体稳频,所以工作可靠。VT1振荡产生的高频载波经555电路③脚的方波信号调制,由天线发射出去。

图2(下图)为接收驱动电路。为简化接收电路,由VT2及其外围元件构成超再生检波器,检出原方波调制信号。由C12、R7加至IC2的③脚进行放大,放大后的信号经VD3、VD4倍压整流,由VT3射随器输出平滑的直流电压。该电压的大小与发送的不同占空比信号波形有关,占空比大,电压高,经R11为VT4提供的偏置电流大,电机的转速高;占空比小,电压低,经R11为VT4提供的偏置电流小,电机转速慢。当占空比足够小时,VT3截止无输出,VT4因失去偏置而不导通,电机M停转。由此可得电机转速与占空比成正比关系。
元器件的选择
L1可用10K型中周骨架,用Φ0.15高强度漆包线绕9匝,L2在L1的外层用同型号漆包线绕3匝,不用屏蔽罩,但需旋入磁芯。L3同L1制作。B用JAl2等金属壳谐振器,频率在27-29.8MHz之间。VT1、VT2、VT3均用3DG130D型NPN三极管,β》100。VT4选用3DD15D型大功率管。RFC用18uH色码电感。IC1的型号为NE555。IC2的型号为LM386。电容除标明的电解电容外均用CC1型高频瓷介电容。电阻均用1/8w碳膜电阻器。
电路的调试
先调发射机载频振荡器,高频扼流线圈RFC及晶振B暂不装上,使C4对地短路。调节R3阻值,使VT1的集电极电流为12mA,然后装上晶振B,此时电流会增至15mA左右,否则应仔细调节L1的磁芯,直至电路起振为止,去掉C4短路线。超再生检波的调试方法是用800Ω的高阻耳机串联一个10uF电容器跨接在VT2的发射极与集电极之间,用无感起子细调电位器RP2及线圈L3的磁芯,直至耳机中有明显响亮的“沙沙”声为止。下一步将发射机天线靠近接收机,接通通控开关S,微调发射机和接收机中线圈的磁芯,直至耳机中能听到清晰的工频声为止,然后拉开两机距离,再进一步细调。其余电路无须调试,一般装好后即可正常工作。
航模遥控开关电路图(二) 五通道航模遥控器的电路图
航模遥控器的电路图,比例遥控的,五通道,元件好找
航模遥控开关电路图(三)
根据遥控器内部空间结构,昨天刚画完整的PCB板子,主控单片机换成了PIC16F917,无线遥控模块先用NRF2401测试,等OK了再换成距离远一点的无线模块;最多8通道,PCB还在打样中。部分原理图和PCB如下图所示:
航模遥控开关电路图(四) 六通道航模遥控发射接收机电路原理分析
这种六通道航模遥控发射接收机电路,可对燃油发动机航模飞机的水平、垂直尾翼、襟翼和发动机等各种动作参数进行数字比例遥控,亦可对需要数字比例遥控的其它舰船模型进行有效的控制。
现在分别对发射机和接收机电路的工作状态作一分析:
发射机电路如下图所示。
六通道数字比例信号的产生由下图中IC1担任,IC1是可编程7通道RC编码器集成电路NE5044,IC1的1-7脚上外接分压电路,利用这些引脚上电压的变化,对IC1的11脚输出的串行脉冲群分别单个进行脉冲宽度调制,因为本机仅用六通道,所以IC1的7脚接地。
IC1的1-6脚的控制电压在0-5V之间变化,15脚输出的5V基准稳压源提供各级电路所需稳定电压。由于控制电路比较复杂,现对各通道控制回路和功能作一简单介绍:
升降(elevator)调节:IC1的1脚电压由W4和W7进行调节,通过接收机的舵机电路对升降舵进行小幅度控制;而大幅度控制是通过W6、W8和Wl产生的控制电压经运算放大器2-1放大后,再对IC1的3脚的电压进行较大幅度的控制,以实现飞机升降中的不同幅度数字比例遥控。对W12的调节是在发射机内作一次性调整襟翼(flap,aileron)控制:襟翼是大型模型飞机主翼后侧的副翼,在飞机起降中担负重要作用。发射机上对它的的控制是通过W5、Wl0和W2调节IC1的2脚上的电压进行的,对W13的调节是在发射机内作一次性调整。
方向舵(rudder)控制:由W3和W9对IC1的4脚电压进行控制,以实现对飞机垂直尾翼上方向舵进行控制。
发动机动力控制:是通过Wll对IC1的6脚电压进行控制,从而通过接收机的舵机电路对发动机油门上的节气阀门(throttle)进行数字比例遥控,最后达到对发动机动力控制的目的。
另外,由开关K3对IC1的5脚电压作0V和5V的切换,以形成两档变速开关。
有时飞机在爬升的同时需要发动机增大马力,在电路上是通过运算放大器IC2-2将W6控制的升降信号放大后送到IC1的6脚,这样一来,IC1的3脚和6脚的电压同时变化,以实现飞机在爬升的同时增大发动机动力。如不需此项控制,可闭合Kl。
K2和K4的闭合可增加控制能力。K6、K7、K8和K9均为双刀双掷开关,称之为倒向开关,可使对IC1的1-6脚的控制电压改变极性,目的是使电位器的操纵手柄变动方向与飞机的飞行运动方向一致,如将W3的操纵手柄向右推动时飞机原向左转,这时可拨动K9使飞机向右转、以顺应操纵习惯。
IC1的11脚输出的串行脉冲群如下图中第1条波形图所示。该信号经VT9放大倒相后,再经VT8放大恢复原形,然后,每当VT7导通时VT6截止。VT6提供给发射机共基丙类放大推动级VT2的电压波形如下图中第2条波形图所示。
实际上,这波形是VT3产生的29.785MHz本振信号的包络波形,是经脉冲宽度调制的调幅波,在其中可看出本发射机各通道信号在脉冲群中对应的位置,各通道控制电位器改变电压可使对应脉冲宽度在0.7-1.7ms之间发生变化,IC1的1-6脚上电压越高,输出对应脉冲宽度越窄。发射机所发射的脉冲群周期约为24ms,周期长度可由W15微调。
经VT2放大的调幅波通过耦合变压器Tl在VT1中进行高频功率放大,再经滤波网络送到天线,发射到空间。
发射机电源由机内10节1.2V镍镉电池供电,K5为电源开关,M为输出电压表,表示发射级工作电流,因其它各级电流较小、故近似用总电流表示发射级工作电流。
IC1电源由Rl0直接提供,IC1的15脚输出的5V基准电压通过VT5控制VT4电流,平时VT6在R6作用下一直导通提供推动级VT2电源,只有当IC1的11脚有正脉冲群来到时才会截止。