基于线性TSL1401CCD的直立智能小车设计.pdf
时间:08-26 14:20
查看:1847次
下载:163次
简介:
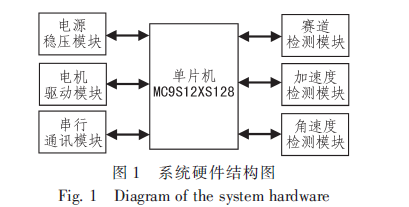
按照全国大学生智能车竞赛的规则,设计一种两轮直立智能寻迹小车。小车以MC9S12XS128单片机(MCU)为控制单元,利用线性TSL1401CCD传感器采集赛道信息,陀螺仪检测小车的角速度,加速度计测量小车的加速度。MCU计算出控制左右电机转速的PWM输出量,通过控制电机转速实现小车的直立、速度和方向控制。测试表明线性TSL1401CCD传感器具有很好的前瞻性,硬件系统稳定可靠,软件能够及时有效对小车进行PID控制,小车能够实时跟踪赛道,完成比赛。