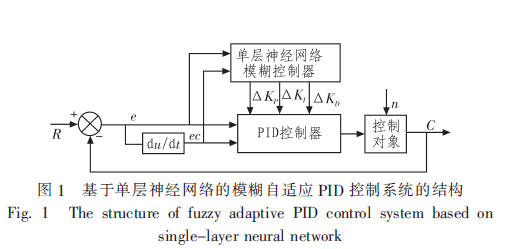
针对传统PID在智能仪表中难以实现准确的参数自整定问题,提出了一种基于单层神经网络的模糊自适应PID控制器的设计方案,该方案将单层神经网络用于模糊规则的建立和推理,使模糊控制具有自学习功能,可更好地适应复杂控制系统的参数自整定。通过MATLAB/SIMULINK平台,对其进行了仿真研究,仿真结果表明,该方案具有较好的鲁棒性、稳定性和实时性。
基于MATLAB-Simulink的系统仿真技术与应用—习题讲解
基于MATLAB-Simulink的系统仿真技术与应用—1.3.2
仿真基于VCS和Modelsim
使用Quartus II进行仿真验证
基于MATLAB-Simulink的系统仿真技术与应用—1.1_1.3.1
labview 8.6 入门视频教程 做一个示波器 1
基于MATLAB-Simulink的系统仿真技术与应用—1.3.3
基于MATLAB-Simulink的系统仿真技术与应用—3.1.1_3.2.1
Cocktail
x