摘要:飞控系统是无人机的核心,无人机的外部架构对其性能的影响也很重要。为了提高无人机系统性能,给出一种无人机控制系统设计并进行了实验。文章在介绍变形飞行器和飞控系统功能要求的基础上,给出了基于芯片LPC2148的硬件设计,介绍了各个硬件部分的功能、软件架构和控制规律的选择与设计,详细介绍了实验的准备工作和实际飞行情况,给出了软件调试流程图,分析了调试结果。经过多次飞行试验,表明系统的设计是适合实验中的可变形飞行器的,并且合理可靠,能够完成预期的飞行任务,具有较好的实用性。
关键词:变形飞行器;飞控系统;无人机;地面控制站;实验
0 引言
无人驾驶飞行器简称无人机(UAV),是一种由动力驱动、无人驾驶和可重复使用的航空器。无人机因其成本低、效率好、应用灵活、危险系数小等优点而广泛应用于侦查、目标指示、生化武器探测、电子干扰、航空摄影、水灾监视等军事和民用领域。
随着国家现代化和国防事业的发展,单一飞行模式的飞行器(运输机、战斗机、旋翼机、火箭、导弹、无人机、飞艇、空天往返飞机等)已经难以满足不断增长的需求。新一代空天飞行器从地面或运载平台上起飞,可以穿越大气层飞行,执行各种任务使命,其飞行环境(高度、飞行马赫数等)变化很大。固定外形的飞行器很难适应如此广泛的环境参数变化,保持优良的性能。为了适应更加宽广的飞行空域和速度范围变化,需要发展一种能随着外界飞行环境自适应地改变飞行器外形、始终保持优良飞行性能的“智能变形飞行器”。
无人机控制系统的核心部件为机载飞控系统和地面控制站。飞控系统实现对无人机的自主飞行控制;地面控制站实现对无人机遥控,航迹规划,改变飞行计划,通信联络等任务。地面站同时完成接收、处理、发送信息的任务。
1 飞控系统功能要求
保持无人机按照预定飞行计划飞行,并且能根据地面指令及时调整姿态和飞行;对扰动具有抗干扰性,能及时从扰动中调整和恢复正常飞行;并且具有较小的体积和重量,保证无人机的飞行效率和足够的飞行时间。对飞控系统的具体要求为:能完成飞行控制信号输出,控制升降舵机、方向舵机、发动机油门舵机和副翼舵机;对当前飞行状态信息的采集,包括航向、姿态、高度、速度;通过串口接受GPS信息;地面控制站和飞控系统通过数传电台进行数据传输;能够在遥控飞行和自主飞行间切换。
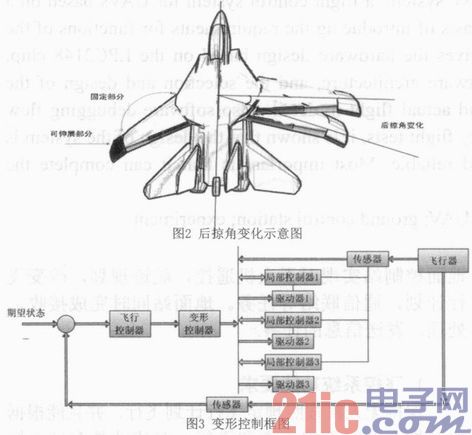
2 变形飞行器机构和变形控制
飞行控制器根据飞行任务和飞行条件的要求,确定副翼变形频率,使变形速度既满足任务需求,又对飞行产生的不利影响最小,而变形过程中机翼的转动会对飞行器的气动力产生影响,气动布局的改变使其稳定特性受到影响。所以合理选择变形飞行器,变形控制算法的设计和布置内部硬件显得尤为重要。
本设计采用的变形飞行器结构为仿F-14模型,如图1。
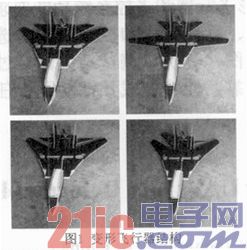
该模型特点如下:一是机翼结构为后掠角可变,二是全动尾翼结构,机体横侧向滚转灵活。
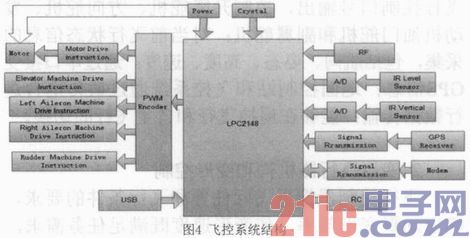
3 机载飞控系统结构图总体设计
我们采用开源网站开发设计的机载飞控系统飞控板,系统设计如图4所示。
3.1 系统芯片介绍
LPC2148是基于一个支持实时仿真和嵌入式跟踪的32位ARM7 TDMI-S CPU的微控制器,并带有32kB和512kB嵌入的高速flash存储器。该芯片可以配置GPS、红外传感器等外部设备来达到我们预期的飞行目的。

由于天空和大地之间的温差,它们的红外辐射波长有差别。系统采用的红外传感器对8~15μm波段的红外辐射敏感,这正是天空和大地的一般热辐射波长,因此传感器不会被过热(如太阳)或过低温度的物体影响。由一对热电堆产生的反向电压经过放大器放大,再经过模数转换,即可显示为代表无人机某一方向姿态角的数值。
一般采用三对红外传感器。其中垂直方向传感器的作用是初始化天空与大地的温差,以确定水平方向传感器的计算比例。水平方向则有横向和径向两对传感器,分别计算滚转和俯仰角度。
3.3 GPS
全球定位系统GPS采用LEA-5H,它的体积小、性能好,位置更新频率为4Hz。LEA-5H与系统串行接口相连,获取无人机的飞行速度、高度、经纬度等信息实现实时导航控制。
3.4 调制解调器
调制解调器采用Digi的XBee模块,XBee的双向链路给飞行中的调整、导航指令传输和飞行状态反馈提供通道。XBee的射程达到40km,所有型号的引脚兼容,和天线一起重量约为2g。
3.5 遥控模块
遥控模块包括遥控指令发送机和接受机。遥控指令发送机采用Spektrum DX-7,接收机采用FutabaFASST 7-channel接收机。发送机发送遥控指令,接收机接收遥控指令,并将指令传送给系统芯片。
4 软件
软件架构采用基于UML语言的仿真软件。UML可以对任何具有静态结构和动态行为的系统进行建模, 能够应用于软件系统开发从需求分析到软件测试的各个阶段,适用范围极广。
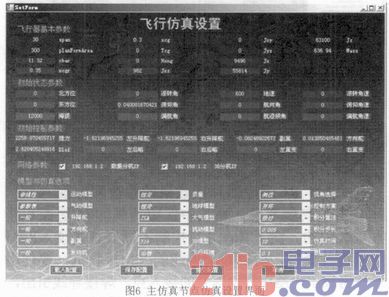
4.1 飞行仿真配置
飞行器在实际飞行前需要验证飞行算法,对飞行仿真进行相应的配置,如图6所示,主要分为四大部分:飞行器基本参数、初始状态参数、初始控制参数、模型与仿真选项。
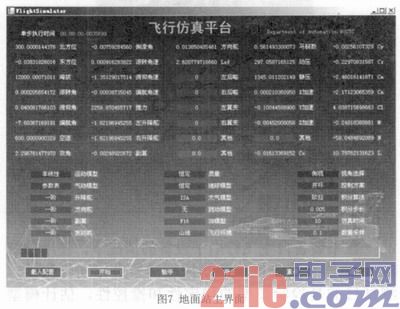
4.2 飞行仿真平台
飞行仿真平台实时观测飞行器的位置、俯仰角、滚转角、偏航角等信息。平台负责飞行中对无人机进行实时控制和监测。
5 控制规律选择与设计
工程实际中PID控制器应用最为广泛,本设计采用PID控制器。
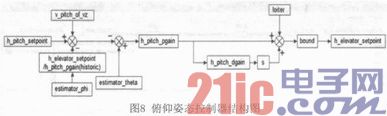
5.1 俯仰姿态控制回路
俯仰姿态控制回路保证飞行器俯仰角在扰动后能以一定的性能保持或者稳定到给定值。该控制回路由俯仰角反馈回路和俯仰角速率反馈回路构成。
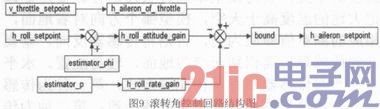
5.2 滚转角控制回路
滚转角控制回路的主要作用是当飞行器飞行过程中受到外力时,能够使飞行器保持固有的滚转角的控制,飞行器改变方向时也需要滚转角控制回路的辅助配合。
6 无人机实验
6.1 系统电子设备的连接、调试与测试
图11是主要电子设备连接图。包括Tiny2.11控制板(嵌合LEA-5H GPS芯片)、水平和垂直姿态传感器、RC接收器、FTDI数据线、USB数据线及舵机等。这是地面测试状态的连接图,实际飞行测试中FTDI数据线要换成无线Xbee modem。

6.1.1 姿态传感器调试
中心点调试。为了保证实际飞行中模型处于水平状态时姿态返回值为零,必须对三对红外传感器进行初始化归零。

方向调整。姿态传感器的方向要合理配置,才能正确指示模型当前姿态。配置要在室外空旷地进行,以保证附近没有热源干扰,同时为了避免人体温度的干扰,要将模型举高过头顶进行。要点是谨记大地的温度高于天空,模型哪个方向对着地面,相应的测量值即应为正,否则将传感器反向。垂直方向传感器只需识别天空与地面,较易配置。水平方向两对传感器则有两种配置方式:第一种为传感器方向和模型的径向和横向轴线一致;第二种为传感器方向和模型的径向和横向轴线成45°角。两种方式对应的配置文件不同,当前实验中采用的是第一种方式。
6.1.2 无线modem调试
实验采用的是Xbee Pro 2模块,工作频率为868MHz。其通信配置通过X-CTU软件进行。作为地面终端的模块要设定为ZNET 2.5 COORDIN ATORAT模式,而模型上的模块则要设定为ZNET 2.5ROUTER/END DEVICE AT模式。为了提高效率,还可将默认的通信速率由9.6kb/s提高到57.6kb/s。X-CTU设置界面如图13所示。

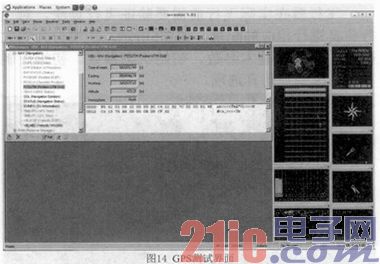
6.1.3 GPS调试
GPS调试必须在室外开阔地带进行,保证周围无高层建筑遮挡信号。可以使用u-blox的软件u-center进行调试,也可直接在GCS中查看GPS信息。实际测试中,LEA-5H芯片的定位时间在2min以内,位置漂移在3m以内。U-CENTER测试GPS界面如图14所示。
6.1.4 RC遥控器和接收机的修改和配置
出于安全考虑,系统中保留传统的RC遥控和接收是必要的。由于Tiny 2.11控制板需要直接读入PPM信号进行处理,所以对于普通的PPM接收机,要使用示波器找出电路中PPM信号的接入点,焊接导线引出,再接入Tiny 2.11控制板。当前实验采用的是天地飞WFR09-P 8通道接收器,其电路修改如图15所示。

各通道信号都需使用Real time plotter和Message工具确定信号范围和中点,从而正确设置各通道的控制量及输入方向。
6.2 飞行试验
6.2.1 模型测试
在不装备自主飞行电子设备的情况下,使用传统RC遥控器和接收机,手动控制模型进行飞行测试。测试目的是检验模型的稳定性和操控性,估计模型能否进行自主飞行,并进行相应的修改和调整。
6.2.2 装载控制设备的模型地面测试
该测试与上面的电子设备调试基本相同,差异在于此时各电子设备都布设在机舱内。须注意以下几点:模型重量的控制和重心的合理配置;舵机的方向调整,确保在AUTO模式下和手控状态下舵面偏转方向一致;电子设备的绝缘保护;抗干扰措施。Xbee Modem与RC接收机应尽量远离电调,它们之间的距离也应尽可能大。此外,接入Tiny控制板的大量导线要用小磁珠扎在末端,以减小电磁干扰。
6.2.3 自主飞行测试
在自主飞行试验之前,除了要进行上述各项测试工作,还必须完成飞行相关配置和飞行计划的编写,编译和软件模拟等工作。
(1)飞行相关配置。这包括电机、舵机、GPS、Xbee modem、RC遥控等配置;
(2)飞行计划编写。为自主飞行编写合适的飞行计划,包括初始位置、飞行航迹和飞行高度等。注意要事先用手持GPS确定试飞场地的经纬坐标;
(3)飞行模拟。各配置文件编写完成,编译无误后,在地面站进行飞行模拟。模拟无误后,上传至控制板。
(4)实际飞行。各项准备工作完成后,到预期地点进行实际飞行。
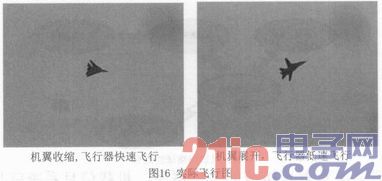
飞行器从home出发,绕以S1为中心的圆飞行。在从home到L1这阶段,飞行器副翼收缩,快速飞行,在飞行中根据收到的GPS信号,不断调整自己的轨迹,到达L1处飞行状态基本稳定,飞行器副翼展开进行定点盘旋。

当飞行器在L2处接收到调整飞行计划命令时,副翼收缩,快速飞行,到达L3处飞行器飞行状态基本稳定,副翼伸展,进行定点盘旋。
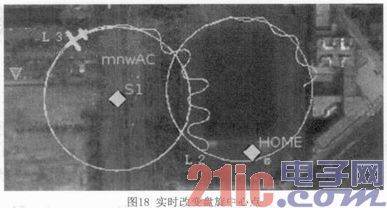
图18实时改变盘旋中心点实际飞行的情况达到了预期效果,实现了预期功能。
7 结束语
系统复杂度较高,所需设备也较多。但是可以自主飞行,同时实现航迹和姿态控制。机载辅助电路将信号发回地面后,完全可以使用独立编制的控制算法进行控制,而信号处理则由软件完成。由于地面平台速度很快,信号延迟不会有太大影响。针对变形飞行器模型,可以充分利用其可变形的特点,实现性能最优化。




























