摘要为提高电动汽车铅酸蓄电池寿命和续航能力,实现蓄电池高效、快速充电,设计了一种智能充电系统。硬件采用DC/DC正激变换电路实现功率的转换,同时以单片利为智能控制核心,并利用DS18B20采集电池温度。软件上根据蓄电池快速充电原理,提出一种分阶段定电流和正负脉冲相结合的新型充电控制策略。利用模块化设计方法,完成各功能模块设计,以及利用数字PI算法实现分阶段电流恒定。实验证明,采用新型控制策略的智能充电系统对蓄电池进行充电,减少了充电时间,提高了充电效率。
关键词智能充电;正激变换;控制策略;模块设计
随着石油能源不断消耗,电动汽车以其节能环保特性被世界各国研究和推广。然而动力电池一直是制约电动汽车发展的最大瓶颈。阀控免维护铅酸蓄电池(VRLA)凭借其制造成本低、容量大、电压稳定等优点成为电动汽车的主要动力设备。但若蓄电池使用不当,其寿命会大大缩短。经研究发现,充电过程对电池寿命影响最大,放电过程影响相对较小。因此充电系统,对蓄电池的寿命起决定性影响。
传统的充电方法是通过加大充电电流,达到快速充电的目的。但大电流充电必然会导致蓄电池过流、过温、极板极化等现象,严重影响蓄电池寿命。若以小电流慢充,虽然对蓄电池寿命影响较小,但充电时间会相对延长。为解决充电时间与电池寿命的矛盾问题,通过对蓄电池充电过程内部化学特性的了解,提出一种新的充电控制策略,实现蓄电池高效、快速、无损害充电。
1 充电控制策略
1.1 快速充电技术的理论基础
20世纪60年代,美国科学家马斯以最低析气率为前提,提出蓄电池能够接受的最大充电电流和可以接受的充电电流曲线,其方程为
![]()
式中,i为任意时刻t时的蓄电池可接受充电电流;I0为最大可接受充电电流;a为衰减率常数,也称为充电可接受比。
1972年,马斯又在第二届电动汽车大会上提出了著名的马斯三定律,奠定了快速充电的基础。
第一定律:一个蓄电池以任何给定电流放电,它的充电接受率a和放电容量C的平方根成反比,即
![]()
式中,K为放电电流常数;C为蓄电池放电的容量。
第二定律:对于任何给定的放电深度,一个蓄电池的充电接受率a和放电电流Id的对数成线性关系。即
a=K2lgkId (3)
式中,K2为放电量常数,视放电深度而定;k为放电常数。
第三定律:一个蓄电池经几种放电率放电,其充电接受电流是各个放电率下接受电流之和。即
It=I1+I2+I3+… (4)
式中,I1,I2,I3,…为各放电率下的充电电流。
马斯三定律表明,在充电过程中,当充电电流接近蓄电池可接受充电电流曲线时,适时的停止充电,并在停止过程中加入放电脉冲,可以消除极化现象,提高蓄电池的充电接受能力,从而大幅提高充电速度,对蓄电池的容量和寿命不造成影响。
1.2 充电控制策略
根据马斯三定律的理论基础,实验以12 V/12 AH铅酸蓄电池为对象,设计的充电控制策略,将充电过程分为三个阶段:大电流恒流、正负脉冲快速充电、恒压补足充电,如图1所示。该蓄电池额定电压为12 V,充满电时端电压约为14.7 V,放完电时端电压约为10.8 V,充放电过程中电池温度若达到45℃,蓄电池极化现象严重、极板活性物质开始脱落。
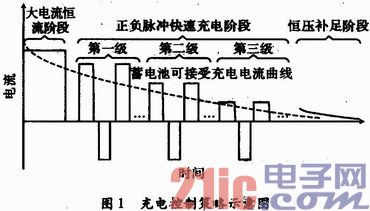
充电过程三个阶段具体控制策略如下:
(1)大电流恒流阶段。充电初期,当电池端压小于12 V时,表示电池电量较低,可以采用大电流进行恒流充电,使蓄电池在较短的时间内尽量充入较多的电量。当蓄电池的端电压上升到14.7 V时,水开始分解,产生极化和析气现象,此时停止充电。一段时间后,转入下一阶段。
(2)正负脉冲快速充电阶段。在脉冲的停歇阶段,随着充电电流的消失,极化现象部分消失。接着再放电,使蓄电池反向通过较大电流,可以消除析气现象产生的气体,并进一步消除极化现象,使蓄电池接受电量的速度加快。将此阶段再细分为三级,使充电电流接近蓄电池可接受充电电流,从而在快速充电的同时,不会对蓄电池造成损坏。
(3)恒压补足充电阶段。经过前两个阶段以后,并不能保证蓄电池电量已充满。此时,还应进行恒压补足充电。此阶段充电电流逐渐减小,当检测到电流下降到某一阈值时,停止充电。此时也标志着充电过程完全结束。
2 硬件电路设计
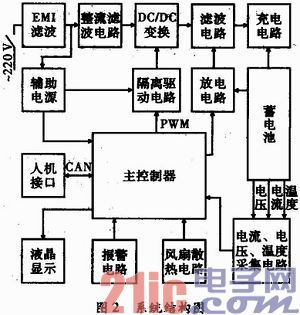
2.1 系统结构
系统结构如图2所示,主要由功率变换电路和智能控制电路组成。功率变换的作用是向蓄电池提供所需的电压、电流;智能控制电路的作用是检测蓄电池的电流、电压、温度等参数,通过数字PI闭环调节,按照提出的充电控制策略,来实现蓄电池智能充电。
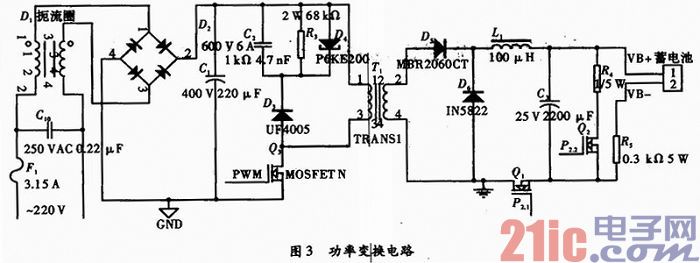
2.2 功率变换电路
由于系统电路功率约在150W,故采用成本较低的单端正激DC/DC变换电路,如图3所示。首先将220V,50Hz工频交流市电连接EMI滤波器,经过整流滤波,接入DC/DC单端正激变换电路,再通过LC滤波后得到直流电源。调节单片机的PWM占空比,来控制N-MOS管Q3的导通关断,进而得到所需的直流电压和电流。同时利用两个N-MOS管Q1和Q2的间歇导通和关断来控制充电和放电脉冲的幅值和时间。Q1导通Q2关断时,实现正脉冲充电;Q2导通Q1关断时,实现负脉冲放电。
2.3 智能控制电路及辅助电源
智能控制电路由STC12C5A60S2单片机、外围电路及检测回路组成智能控制电路。检测电路将采集的当前蓄电池电流、电压及温度送入单片机A/D口,并与系统的设定值进行比较,采用数字PI调节PWM占空比,实现充电过程中的恒流、恒压。并通过控制Q1,Q2两个N-MOS管的导通和关断,来实现正负脉冲快速充电。液晶显示当前的充电状态及电压、电流、温度值。如果超过设定的阈值,报警电路开始工作并停止充电,以实施保护。
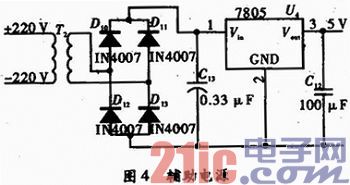
为防止高频功率电路对数字控制电路的干扰,系统利用高速光耦将两个电路隔离。因此,智能控制电路必须单独供电,辅助电源模块如图4所示。利用小功率交流变压器将交流市电降压到12 VAC,整流滤波后利用L7805实现+5 VDC稳压输出。
3 系统软件设计
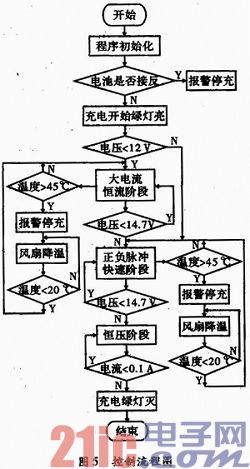
系统软件的主要功能:通过对蓄电池电压,电流的检测使其进入相应的充电阶段,在相应的阶段内,利用数字PI控制算法不断调节单片机的PWM输出占空比,以实现所要求的恒定电流或电压值。同时检测各阶段蓄电池的温度值,若超过45℃,则报警并停止充电,此时启动散热风扇,给蓄电池降温,直到温度恢复到20℃以内。具体控制流程,如图5所示。
4 结束语
系统采用单片机数字PI控制技术与高效、低损耗的DC/DC变换电路相结合。由于单片机运算速度的限制,不可能实现精确的电压和电流输出,但对于蓄电池来说适当的电压和电流的纹波,反而有利于消除充电过程中的极化现象,更有利于充电的进行。与传统恒压恒流充电器充电相比,开发的智能充电器具有以下优点:充电速度显著提高,充电安全,电池升温低,减少了对蓄电池容量和寿命的影响;同时利用价格低廉的单片机来代替昂贵的电源管理IC,实现电源智能化管理,使其具有很强的市场竞争力。
文中完成对12 V/12 Ah蓄电池进行充电控制及其控制策略的开发、研究,该系统及其控制策略对电动车动力蓄电池充电系统的开发、应用,具有实际借鉴意义。