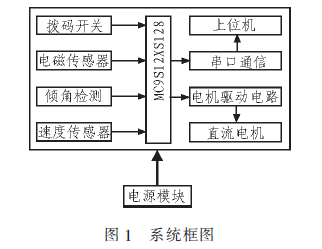
文中以第七届"飞思卡尔"杯大学生智能车竞赛为背景,以飞思卡尔MC9S12XS128单片机为核心,设计了一种自平衡巡线智能车系统。本设计基于倒立摆的动力学模型,经过卡尔曼滤波算法对陀螺仪和加速度计的输出信号进行处理得到智能车的角速度和倾角,再通过PID运算处理后的输出控制智能车的平衡、前进和转向。实验及实际比赛表明,本智能车系统可稳定运行,具有速度快,转向灵活,抗干扰性强的特点。
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
深入浅出玩转STC15单片机-第11讲_模块化编程实例介绍
深入浅出玩转STC15单片机-第17讲_数码管驱动器件74HC595的介绍
ASR M08-A语音识别控制模块 语音控制单片机
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
郭天祥PIC单片机视频教程lesson1_1
Cocktail
x