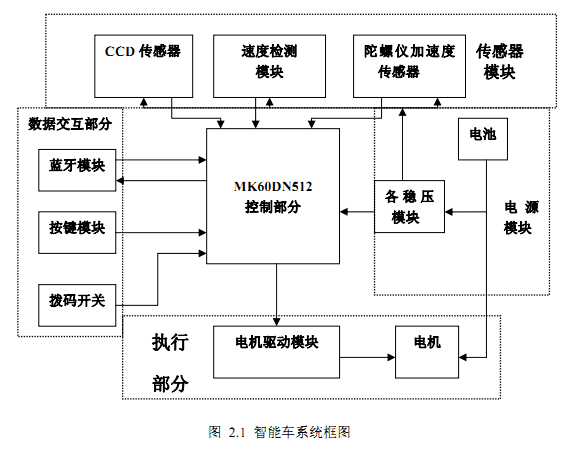
根据光电平衡车直立行走的要求,本车的设计包括五个部分:传感器部分,K60 模块,执行机构(电机驱动),电源部分,数据交互部分。其系统框图如图:
线性CCD从原理到使用最详细讲解一、线性CCD的原理
野火攻城掠地之一天攻破K60-17_线性CCD
线性CCD从原理到使用最详细讲解四、线性CCD软件使用及调试方法
线性CCD从原理到使用最详细讲解三、线性CCD程序调试讲解
线性CCD从原理到使用最详细讲解二、线性CCD信号采集视频
线性CCD从原理到使用最详细讲解七、线性CCD自适应性攻略-XS128
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
Cocktail
x