本文以第八届“飞思卡尔杯”智能汽车竞赛为背景,介绍了两轮自平衡车控
制系统的软硬件结构和开发流程。本系统采用大赛组委会统一指定的D车模,
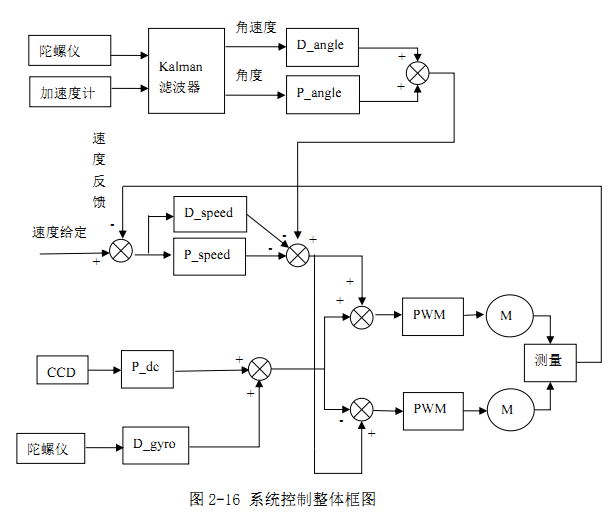
以Freescale公司Kinetis 系列32位单片机MK60DN512ZV为核心控制器,在Keil uVision4中进行软件开发。在直立控制中,使用飞思卡尔加速度传感器MMA7361 以及村田公司ENC-03陀螺仪,经kalman滤波器对加速度计和陀螺仪的信息进行融合,获取车模直立姿态。方向控制中,使用TSL1401线阵CCD传感器进行赛道检测,由otsu算法计算出阈值,并对图像二值化,得到道路信息,通过两轮差速进行车模转向控制。对路障和虚线部分进行特殊处理,实现了模型车在跑道上的平稳运行。