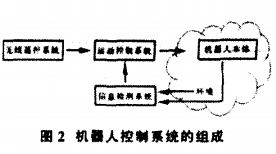
针 对 一 辆 无刷 电机 驱 动 的 履带 式 移 动机 器 人 B HT R.1 , 对 其 包 括 运 动 控 制 系统 、信 息 检 测 系 统 、无 线 遥 控 系统 等 各 部 分 在 内 的 控 制 系 统 进 行 了 设 计 。运 动 控 制 部 分采 用 以 DS P L F 2 4 0 7 A 为 主 控芯 片 、 以无 刷 电 机 专 用 芯 片 MC 3 3 0 3 5和 驱 动 桥 M P M3 0 0 3为 电 机 驱 动 控 制 的 方 案 ; 信 息 检 测 系统 采 用 红 外 传 感 器 来检 测环 境 障 碍 信 息 , 并 安 装 无 线 视 频 设 备用 以监 控 机 器 人 运 行 环 境 : 无 线 遥控 系统 采 用 摇 杆 式 脉 宽 比 例 调 节 方式 来 实 现 对 机 器 人 的 调 速 及 其 他运 动 控 制 。