煤矿救援机器人自主避障模糊控制系统研究.pdf
时间:11-11 11:08
查看:1325次
下载:162次
简介:
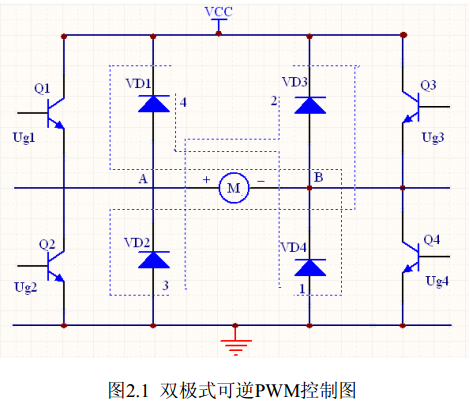
针对煤矿井下环境的特性及要求,本文提出了运用模糊控制算法实现煤矿井下救援机器人自主避障的方案并进行了系统软硬件设计。煤矿救援机器人的系统设计包括硬件设计和软件设计。硬件设计是以LPC2210为核心,包括ARM最小系统模块、传感器模块、电机驱动模块和通信模块。在运动过程中,采用光电传感器测量驱动轮的转速,超声波传感器测量与障碍物的距离。软件设计包括数据采集、数据处理、数据存储以及与上位机的通信。