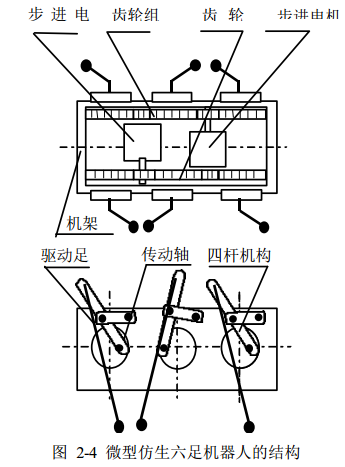
本文详细的介绍了关于多微型机器人协作系统的相关研究。 该多机器人系统 基于自行开发研制的微型仿生六足机器人 。该机器人在一定程度上模仿了六足昆 虫的运动机制和步态 。该机器人由两枚高功率的步进电机驱动 ,可以执行基本的 运动 ,例如前行 、后退 、左右转弯等, 同时该机器人还具有一定的计算能力和通 信能力 。与传统的移动机器人相比 ,该机器人具有几何尺寸小 自适应性强 功 耗低等特点, 并且可以在特殊的非结构环境中工作 。本文还讨论了关于多微型机 器人的分布式定位问题 ,并提出了一种新型的基于部分可观 Markov 过程的定位 方法 ,与常见的微型机器人定位方法相比 ,该方法充分利用了机器人本体的驱动 信息, 将其与外部视觉传感信息融合 ,因此具有鲁棒性好 ,对系统硬件要求低等 特点 。另外 该定位方法以分布式形式出现 因此具有很好的可扩展性。