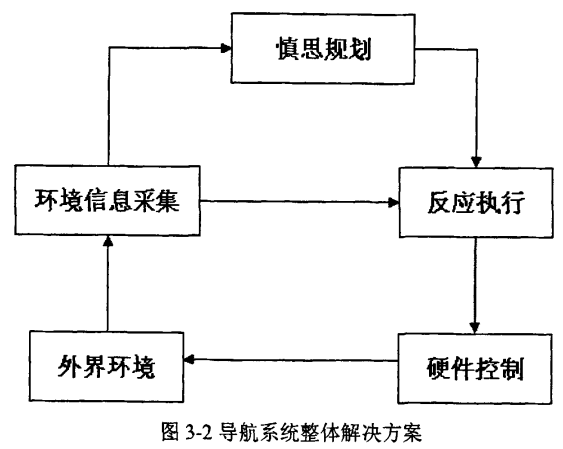
本文针对在室内环境中工作的服务机器人的导航问题展开研究,尝试给出一个适合室内环境下的服务机器人导航的解决方案。室内环境中是一个具有静态因素和动态因素的结构化环境,在这个环境中实现机器人导航任务不仅需要机器人能够对突发情形做出快速反应,同时应具有一定自主规划能力。本文基于慎思/反应混合范式,结合室内环境下导航的具体问题需求,将导航系统分为环境信息采集、慎思规划以及反应执行三个模块。
高科技机器人,变形金刚,神兽金刚曝光!
山东大学的大狗机器人通过863一期,可载人 可抗侧踢
基于无线网络的机器人安防项目--华清远见
国产技术宅屌丝DIY恐怖机器人
单足自平衡机器人
基于单片机与传感器的机器人头部运动设计与实现
超强的魔方机器人【点击率最高的视频】
基于51单片机的智能清洁机器人
x